
FLAME Project: Wildfire Detection
2024
NEW: FLAME Diffuser: Wildfire Image Synthesis using Mask Guided Diffusion
For more details, visit the project page: GitHub - FLAME_SD.
Introduction
Wildfires have devastating impacts on natural environments and human settlements. Existing fire detection systems rely on large, annotated datasets that often lack geographic diversity, leading to decreased generalizability. To address this, we introduce the FLAME Diffuser, a diffusion-based framework that synthesizes high-quality wildfire images with precise flame location control. This training-free framework eliminates the need for model fine-tuning, enhancing the development of robust wildfire detection models.
Sample Dataset
- Dataset: Download from Google Drive
Key Features
- Training-Free Diffusion Framework: Generates wildfire images without the need for model training or fine-tuning.
- Precise Flame Control: Utilizes noise-based masks for accurate flame placement.
- Diverse Backgrounds: Creates images with varied and realistic backgrounds, enhancing model generalizability.
Methodology
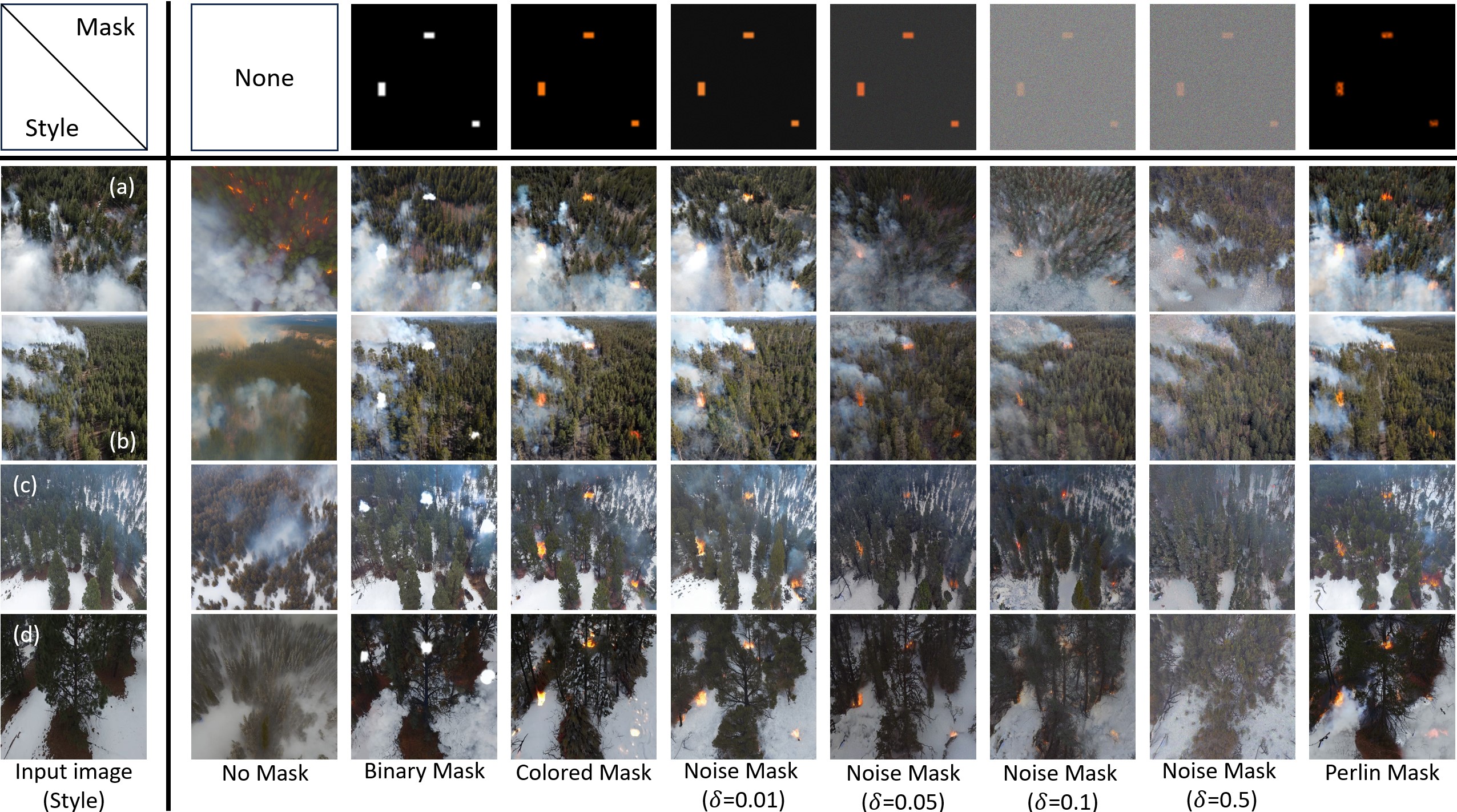
- Mask Generation:
- Masks are generated to define areas for fire elements using fundamental shapes like rectangles and circles.
- Perlin noise is added to the masks to create a smoother integration process.
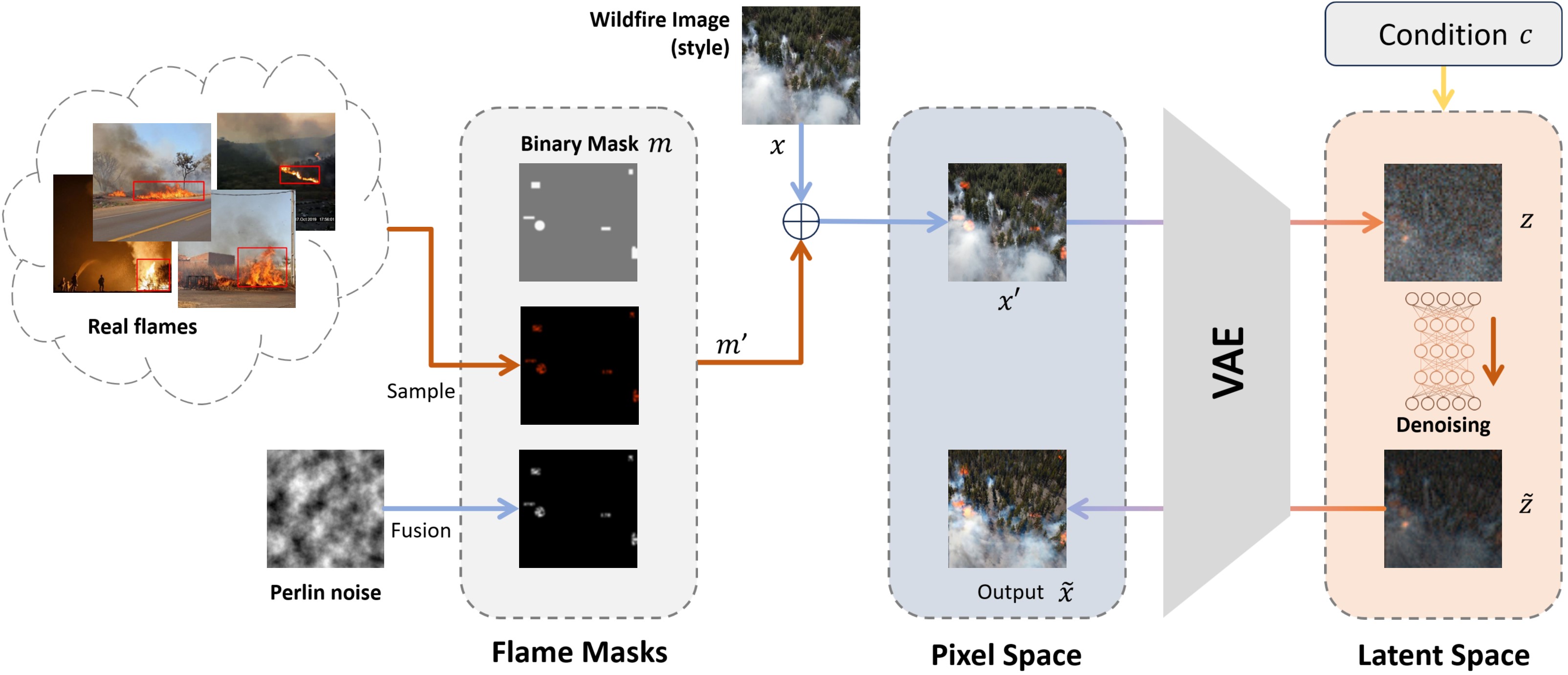
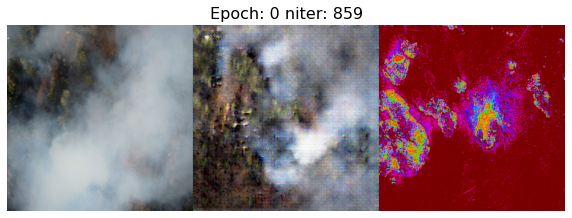
- Diffusion Process:
- Combines masks with raw images, processed through a Variational Autoencoder (VAE) to generate latent variables.
- The denoising U-Net refines these variables to produce realistic images guided by text prompts.
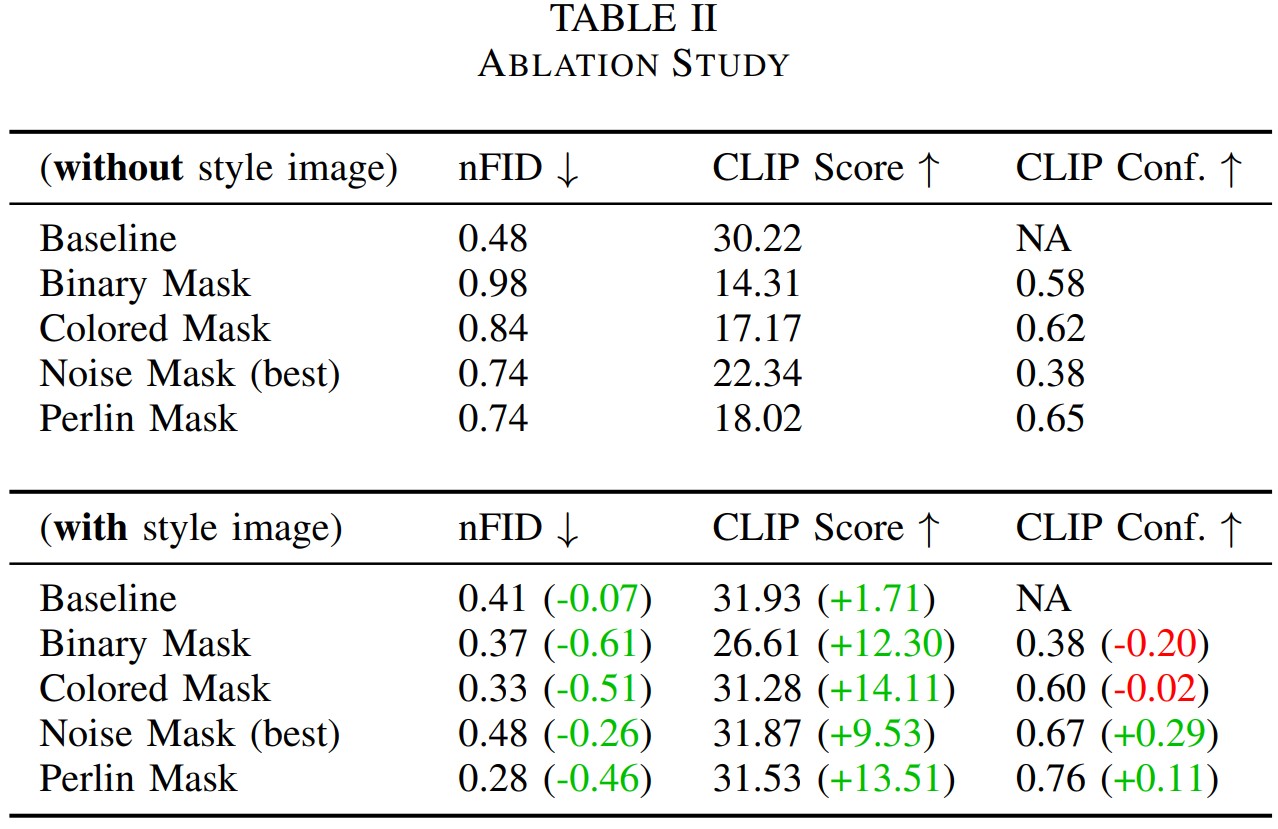
Experimental Results
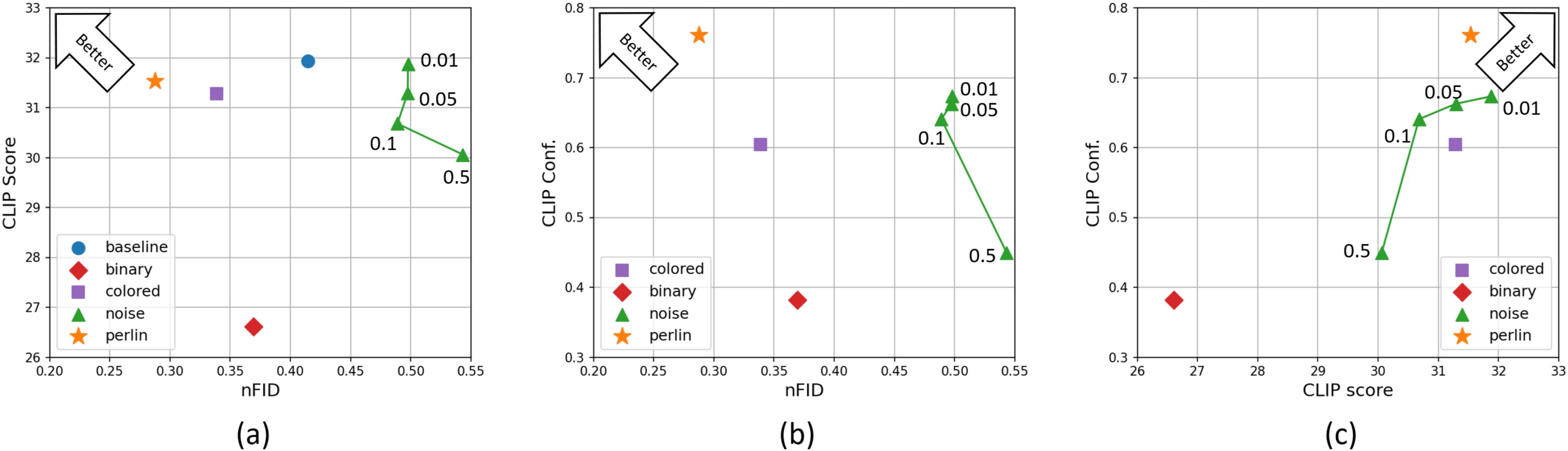
- High-Quality: Lowest FID score compared to other methods, indicating better realistic styles.
- Consistency: Image content does not shift, the semantic information is well-kept in synthesized images.
Funding: This project is supported by the National Science Foundation under Grant Number CNS-2204445. Special thanks to USDA Forest Service and Kaibab National Forest administration.
Citation
FLAME Diffuser: Wildfire Image Synthesis using Mask Guided Diffusion
FLAME1 & FLAME2 Project
Avalible datasets for previous papers:
FLAME 2: FIRE DETECTION AND MODELING: AERIAL MULTI-SPECTRAL IMAGE DATASET
THE FLAME DATASET: AERIAL IMAGERY PILE BURN DETECTION USING DRONES (UAVS)
More information, please reference our previous paper: Wildfire Monitoring in Remote Areas using Autonomous Unmanned Aerial Vehicles
Abstract
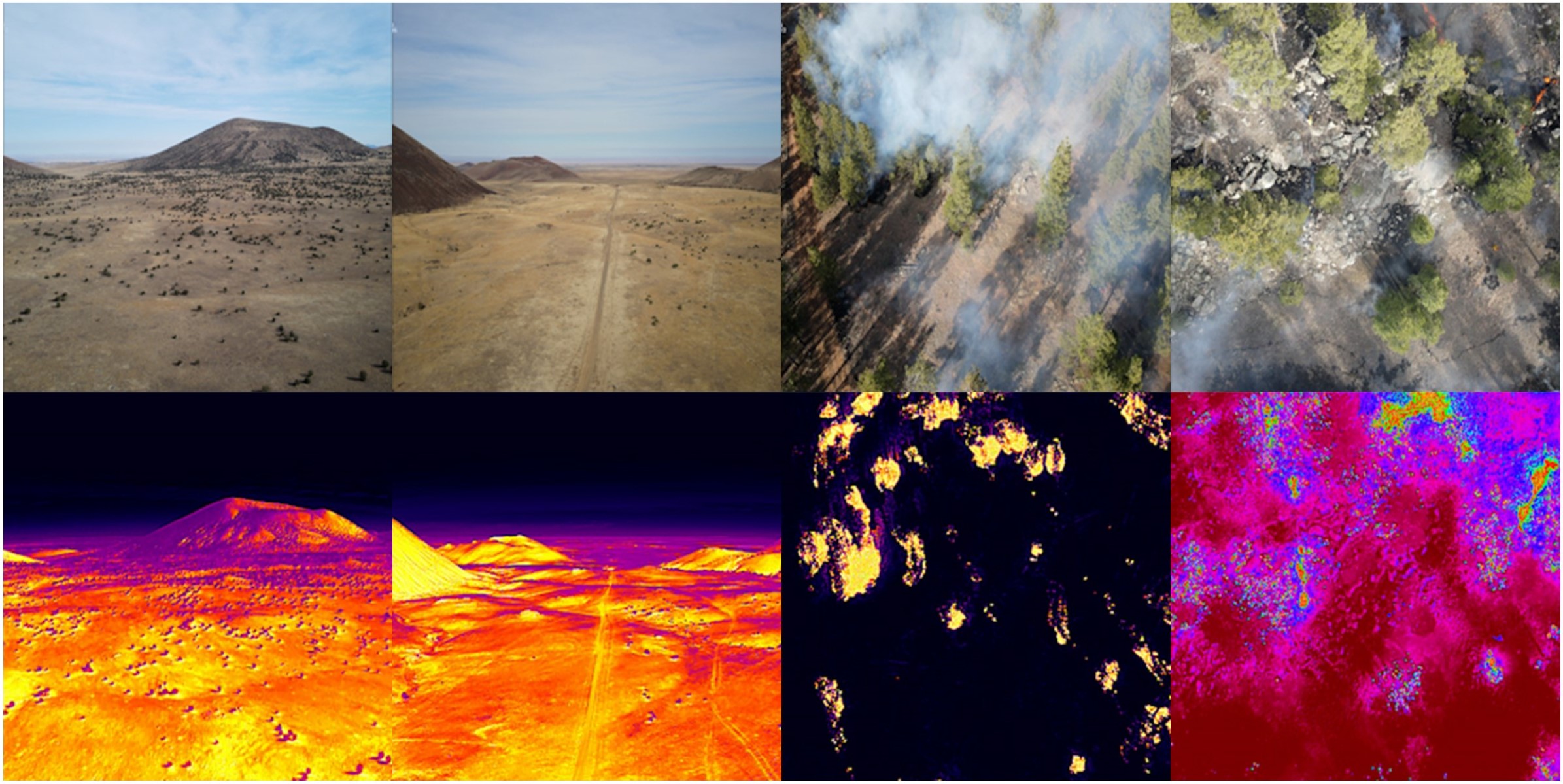
Current forest monitoring technologies including satellite remote sensing, manned/piloted aircraft, and observation towers leave uncertainties about a wildfire’s extent, behavior, and conditions in the fire’s near environment, particularly during its early growth. Rapid mapping and real-time fire monitoring can inform in-time intervention or management solutions to maximize beneficial fire outcomes. Drone systems’ unique features of 3D mobility, low flight altitude, and fast and easy deployment make them a valuable tool for early detection and assessment of wildland fires, especially in remote forests that are not easily accessible by ground vehicles. In addition, the lack of abundant, well-annotated aerial datasets – in part due to unmanned aerial vehicles’ (UAVs’) flight restrictions during prescribed burns and wildfires – has limited research advances in reliable data-driven fire detection and modeling techniques. While existing wildland fire datasets often include either color or thermal fire images, here we present (1) a multi-modal UAV-collected dataset of dual-feed side-by-side videos including both RGB and thermal images of a prescribed fire in an open canopy pine forest in Northern Arizona and (2) a deep learning-based methodology for detecting fire and smoke pixels at accuracy much higher than the usual single-channel video feeds. The collected images are labeled to “fire” or “no-fire” frames by two human experts using side-by-side RGB and thermal images to determine the label. To provide context to the main dataset’s aerial imagery, the included supplementary dataset provides a georeferenced pre-burn point cloud, an RGB orthomosaic, weather information, a burn plan, and other burn information. By using and expanding on this guide dataset, research can develop new data-driven fire detection, fire segmentation, and fire modeling techniques.
Background
This work presents a methodology for identifying and mapping fire and smoke using high temporal and spatial-resolution observations from an integrated two sensor (mid-wave IR and visible bands) UAS-based imaging system. The paper also presents a unique dataset of side-by-side RGB/IR imagery collected during a prescribed fire near Flagstaff, Arizona in 2021 [20]. The images are jointly labeled by two human experts with fire/no-fire and smoke/no-smoke1 labels. In additional to aerial images, data on weather information, and georeferenced pre-burn point cloud data points are included in the dataset. It is expected that the methods developed to produce the FLAME2 dataset and others to follow can facilitate fire detection and modeling, as well as fire management.
Supplemental Dataset - 2D View of Point Cloud
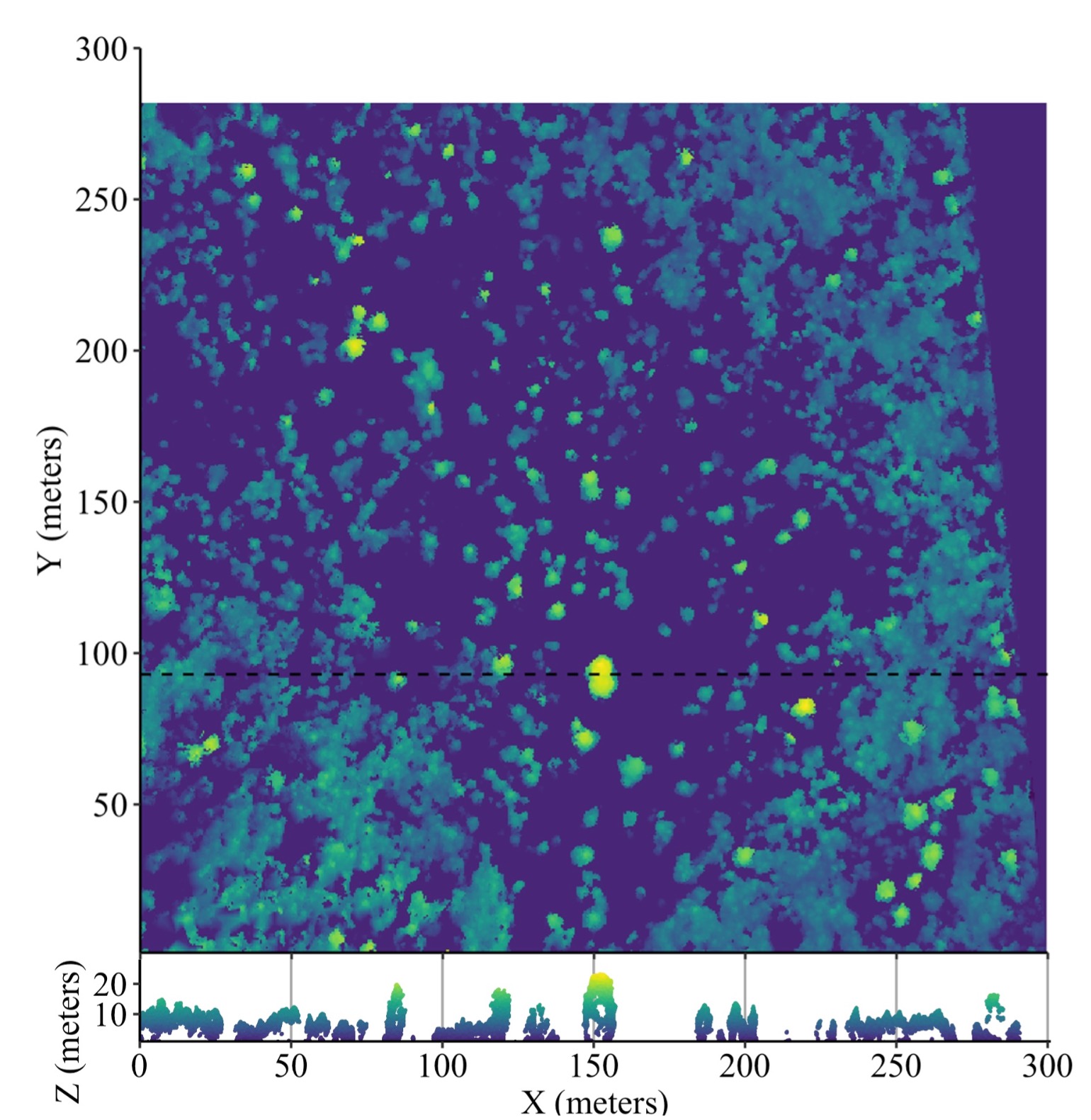
We prepared a supplemental dataset for public access and future analyses, including a pre-burn georeferenced point cloud and orthomosaic. In addition to the photogrammetric products, we included a weather forecast, burn plan, and external resources such as Light Detection And Ranging (LiDAR) point clouds and Digital Elevation Models (DEMs). The dense point cloud and orthomosaic image of the site were generated using the pre-burn imagery collected with the DJI M200 and analyzed with Agisoft MetashapePro. Videos were parsed into images every 60 frames, resulting in 303 photos with sufficient overlap for image alignment. The dense point cloud was generated using structure-from-motion methods. Settings included sequential image preselection, the “high” accuracy setting for image alignment, and “high” quality point cloud. To showcase of the point cloud’s potential uses, Fig. 5 depicts a top-down 2D plot of the normalized preburn point cloud, effectively mapping out canopy heights. The orthomosaic was created from a digital elevation model sourced from the point cloud with the “hole filling” setting enabled. Lastly, the point cloud and orthomosaic were georeferenced using the coordinates of natural features visible in the images and satellite imagery. A mean error of 0.705 m and a resolution of 7.6 cm/px were attained.
DL-Based Wildfire Classification
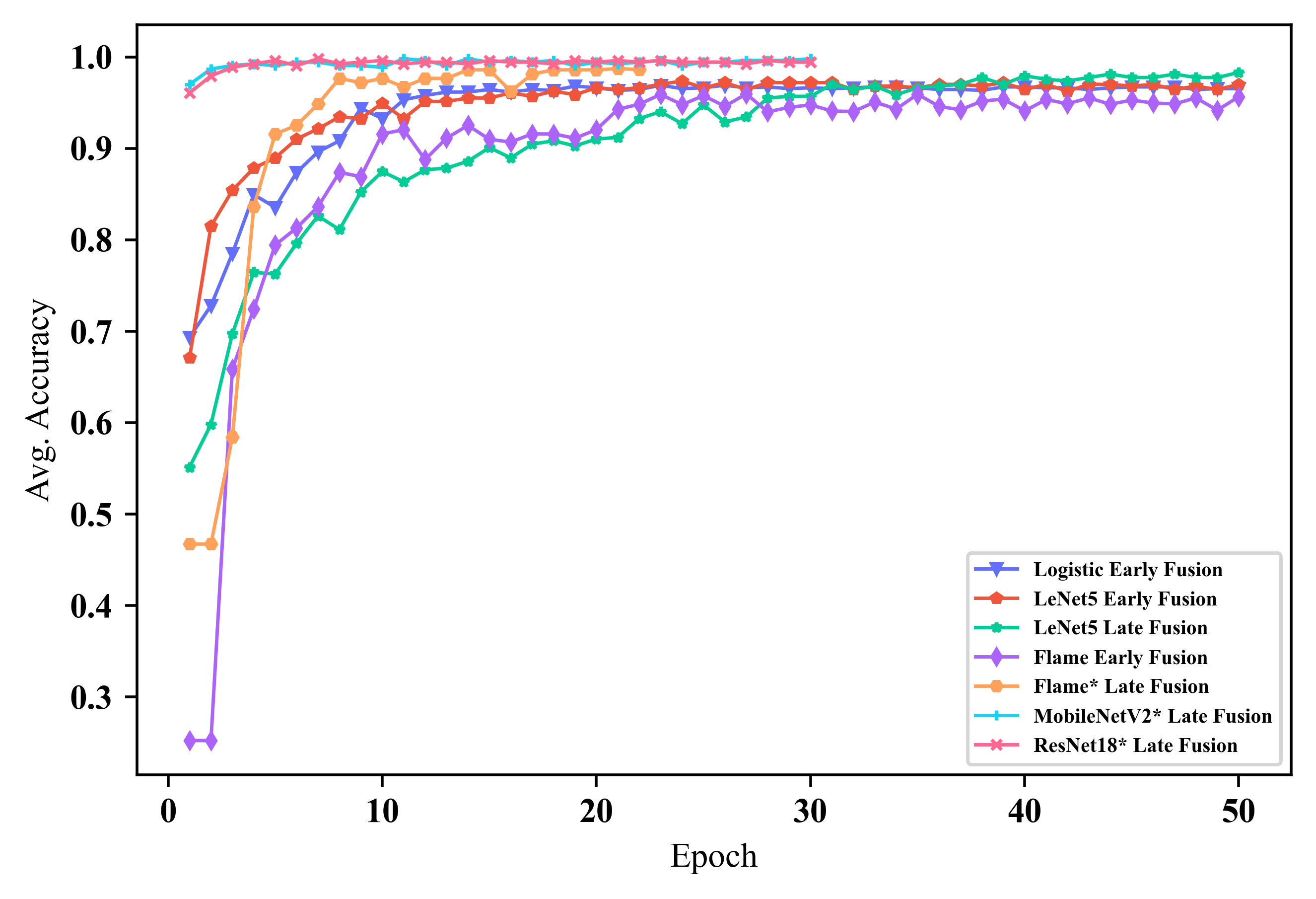
First, we applied some widely used machine learning and deep learning classification models (i.e. “benchmarks”), in- cluding Logistic Regression, LetNet(1989), Vgg(2014) , MobileNet(2017), and ResNet(2016), to our dataset, as well as our method. Note that Vgg, MobileNet, and ResNet are pre-trained (i.e., each model has been trained on some other datasets that have some prior knowledge to understand the features of images, but the high-level features may not be enough for the new task of fire detection). Then, we need only modify some layers of the pre-trained models (their “classifiers”) and train the classifiers on our dataset; then, those models can have good accuracy on our dataset.

RGB/IR Fusion
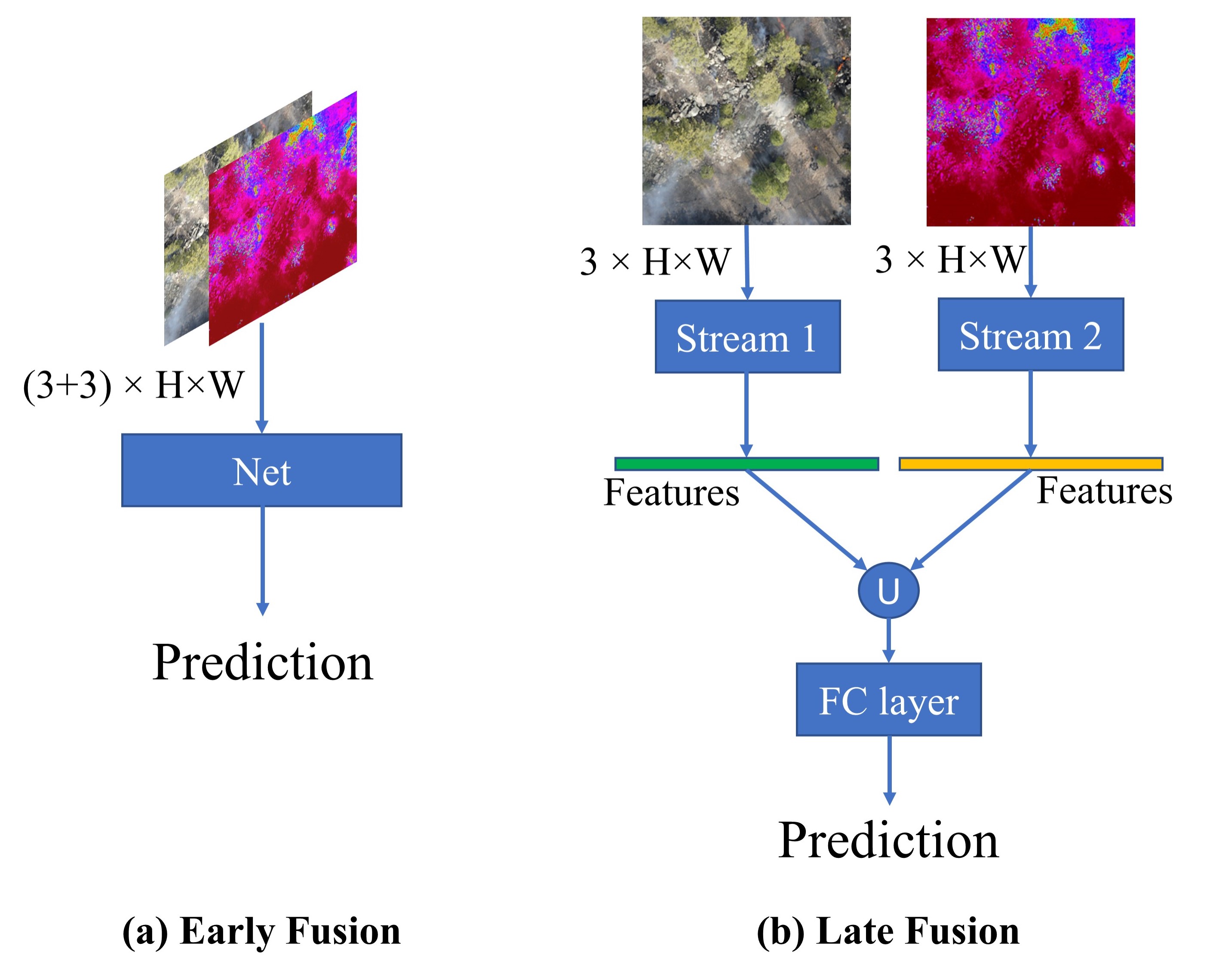
The input of the model can be only RGB images (f (RGB; θ)) or IR images (f (IR; θ)) or we can benefit from inputting both RGB and IR pairs (f (RGB, IR; θ)), where f (·; θ) denotes the network mapping function parameterized by θ. When inputting RGB-IR pairs, we consider two simple approaches to perform feature fusion, named Early Fusion and Late Fusion. Specifically, in Early Fusion, we simply concatenate the paired images and modify the number of channels of the input of the first layer from 3 to 6. In Late Fusion, either RGB or IR will be fed to two streams with the same architecture (i.e. the left stream learns from the RGB domain while the right stream learn from the IR domain). We then concatenate the extracted features from each stream and feed the fused feature to a fully-connected layer to perform classification. Thus, subsequent layers can learn the high-level representation from both RGB and IR domains.
Experimental Results
Fire Classification
We perform ten experiments for each model. We use the ADAM optimizer with 1e−3 learning rate for the Flame network, and 1e−4 for the other models. The batch size is set to 64, considering the label smoothing with probability 0.2 is used in the training phase. To achieve a fair comparison, we train the models that learn from scratch with 50 epochs, and the pre-trained models with 30 epochs. Besides focusing on the accuracy of the classification, we are more interested in the macro-level metrics, such as macro F1 score, macro recall, and macro precision
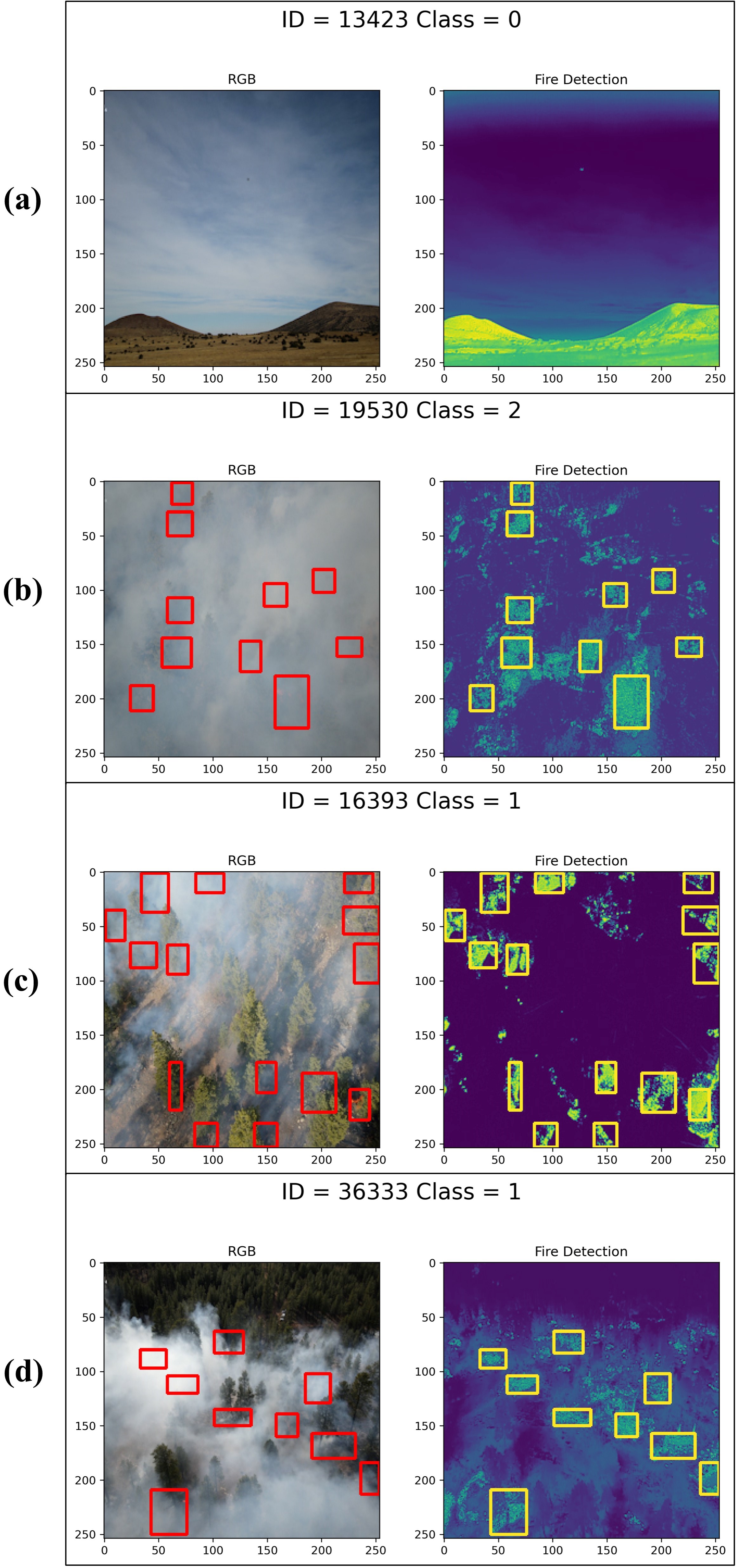
Flame Detection
A Maximally Stable Extremal Regions (MSER) method was applied to detect the image blob features and then generate bounding boxes for detected features. As in many other object detection applications, the MSER method usually generates many partially overlapping bounding boxes for the same object. One simple solution to avoid many unnecessary calls and achieve more precise localization of the fire flames would be using Non-Maximum Suppression (NMS) method to eliminate the overlapping bounding boxes in favor of the strongest one. By fine-tuning the suppression processes of non-maximum parameters and the threshold of pixel intensity (fire-line) on IR images, the algorithm identifies areas with higher probability to contain fire. Figure 8 shows the result of flame detection, where the flame detection’s accuracy is not affected by smoke. Thus, our proposed framework is simple, stable, computationally efficient, and labor-free.
Flame Images Generating
This module uses GAN-based deep learning method to generate RGB flame images from given IR image. For example, input an arbitrary IR image of wildfire, the model will generate a virtual RGB image to describe the fire situation.
This part is only on experimental stage, but it’s good to research the relationship between the wildfire and its smoke. We will keep researching on this topic in future.
Contributing
This project is contributed by:
Leo O’Neill
Please cite our work if you think this project helps your research.
Avalible datasets for now:
FLAME 2: FIRE DETECTION AND MODELING: AERIAL MULTI-SPECTRAL IMAGE DATASET
THE FLAME DATASET: AERIAL IMAGERY PILE BURN DETECTION USING DRONES (UAVS)
More information, please reference our previous paper: Wildfire Monitoring in Remote Areas using Autonomous Unmanned Aerial Vehicles