Research Projects
Cooperative Perception for Autonomous Vehicles
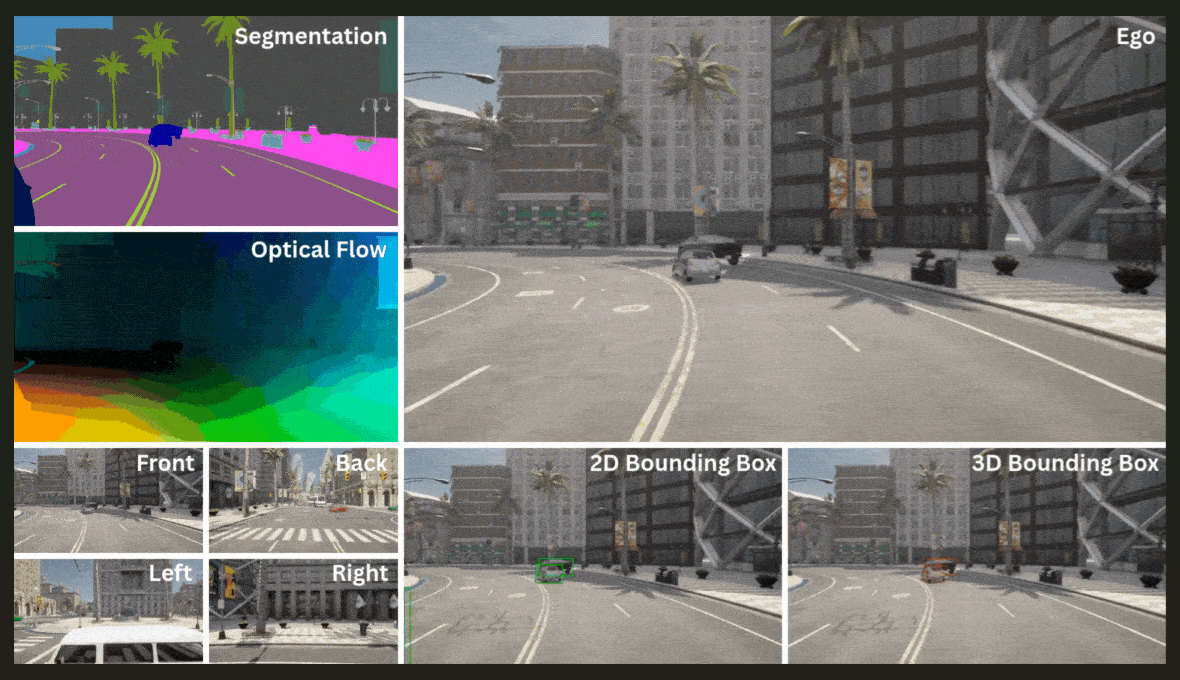
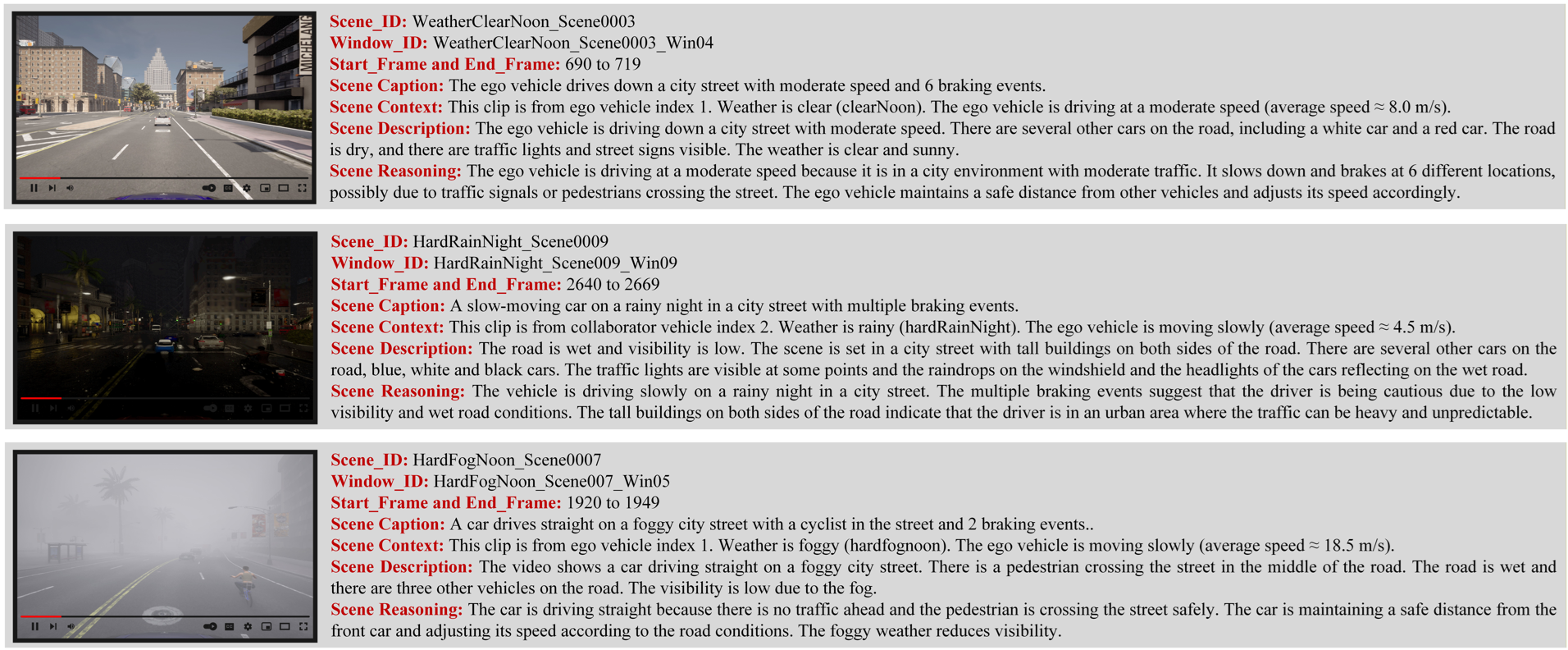
In this project, we design algorithms and create datasets for cooperative perception for autonomous vehicles (AVs), enabling safe navigation of AVs in low-vision, crowded, adversarial, and complex environemnts. VLA4CoDrive is organized into three tightly aligned modalities, Vision, Language, and Action. Sample Dataset with Three Cooperative/Platooning AVs under Different Weather Conditions 
Sample Video Annotation for Perception Training
Sample Annotations for VLA training
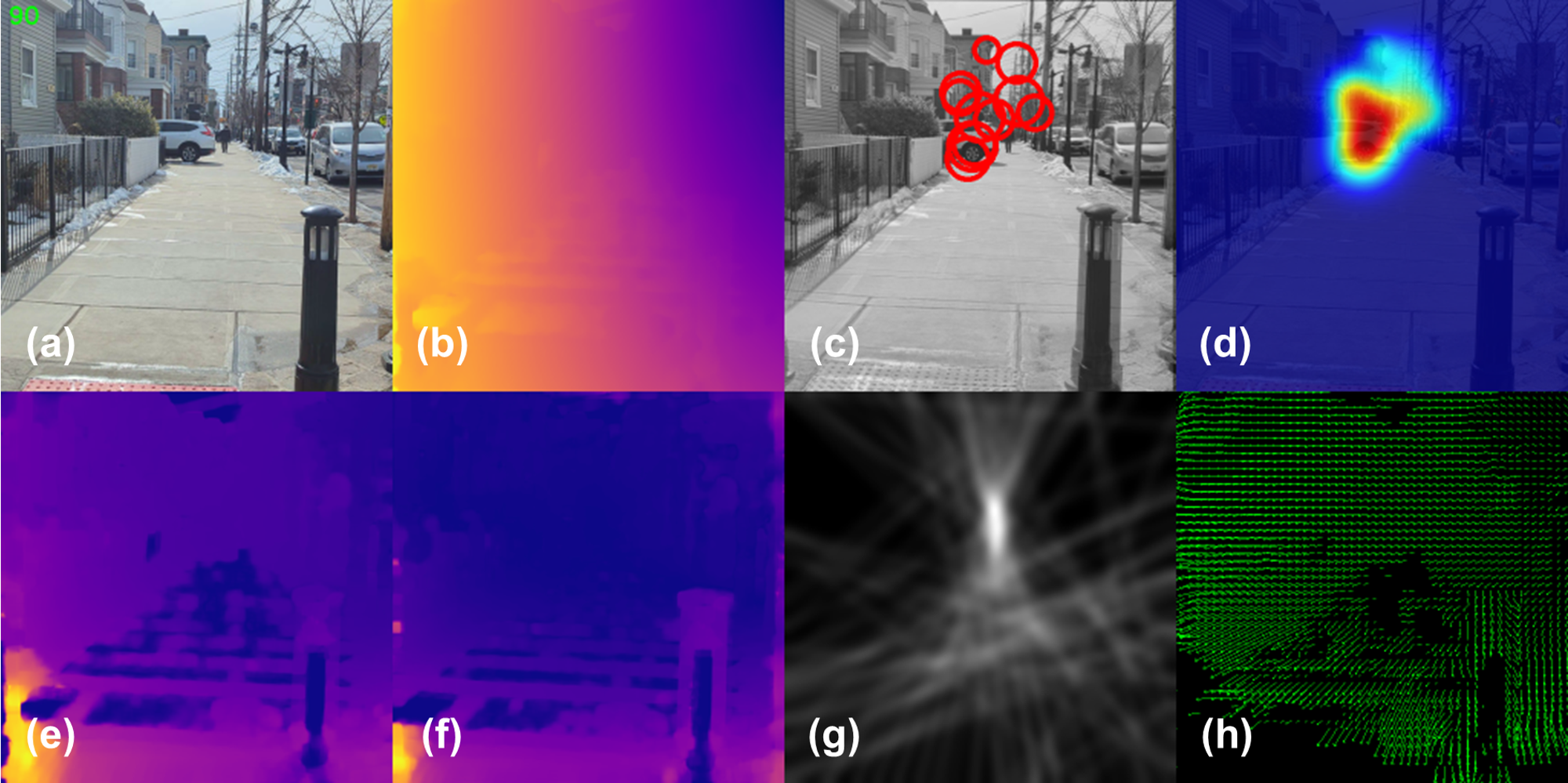
Blind Assistive Visual Navigation
In this project, we use multimodal signal processing, DL-based visual interpretation, and RL-based human feedback coupled with LLM reasoning to produce audio navigation commands to help blind and visually impaired individuals to freely move around and perform their daily tasks more independently. This project is sponsored by the South Carolina EPSCoR GAIN program. See Project Page for more details. 
Building Energy Optimization
This project, in collaboration with BMW researchers, aims to use RL methods for real-time building energy management for complex environments with open zones to accommodate occupant diverse comfort levels and machinery safe operation in complex industrial settings. See Project Page for further details. 
PilotPC: Proactive Inverse Learning of Network Topology for Predictive Communication among Unmanned Vehicles
This NSF-supported project develops learning-based frameworks for safer, privacy-aware, and more reliable networked UAV operations. The project enables accurate prediction and monitoring of UAV behavior by combining inverse learning and deep representation modeling to infer agents’ perception, decision-making, and intent. A smart observation system is designed to detect rare but critical deviations from rational behavior by “seeing the environment from the agent’s perspective” and inferring expected actions under given constraints. The research focuses on both UAV mobility and networking activities as key indicators of anomalous or malicious behavior. The outcomes include new algorithms and open tools for trust assessment and action analysis in autonomous aerial systems. See Project Page for further details. 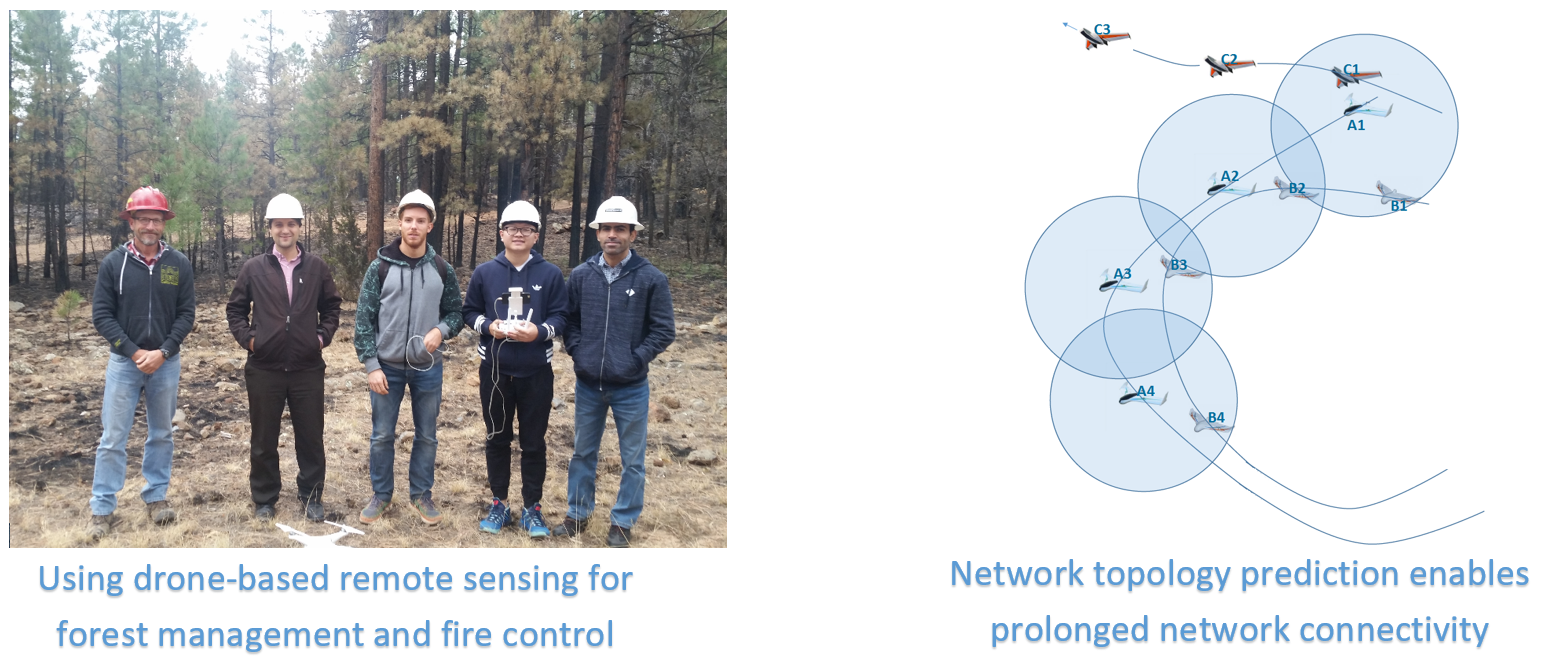
Drones with Overhead Manipulators
In this project, we use reinforcement learning methods augmented by LLM reasoning and Beamsearch optimization to control drones with overhead manipulators for task-specific missions in a range of applications, including power line inspection, forest fire monitoring, and plant pollination. See Project Page for more details. 
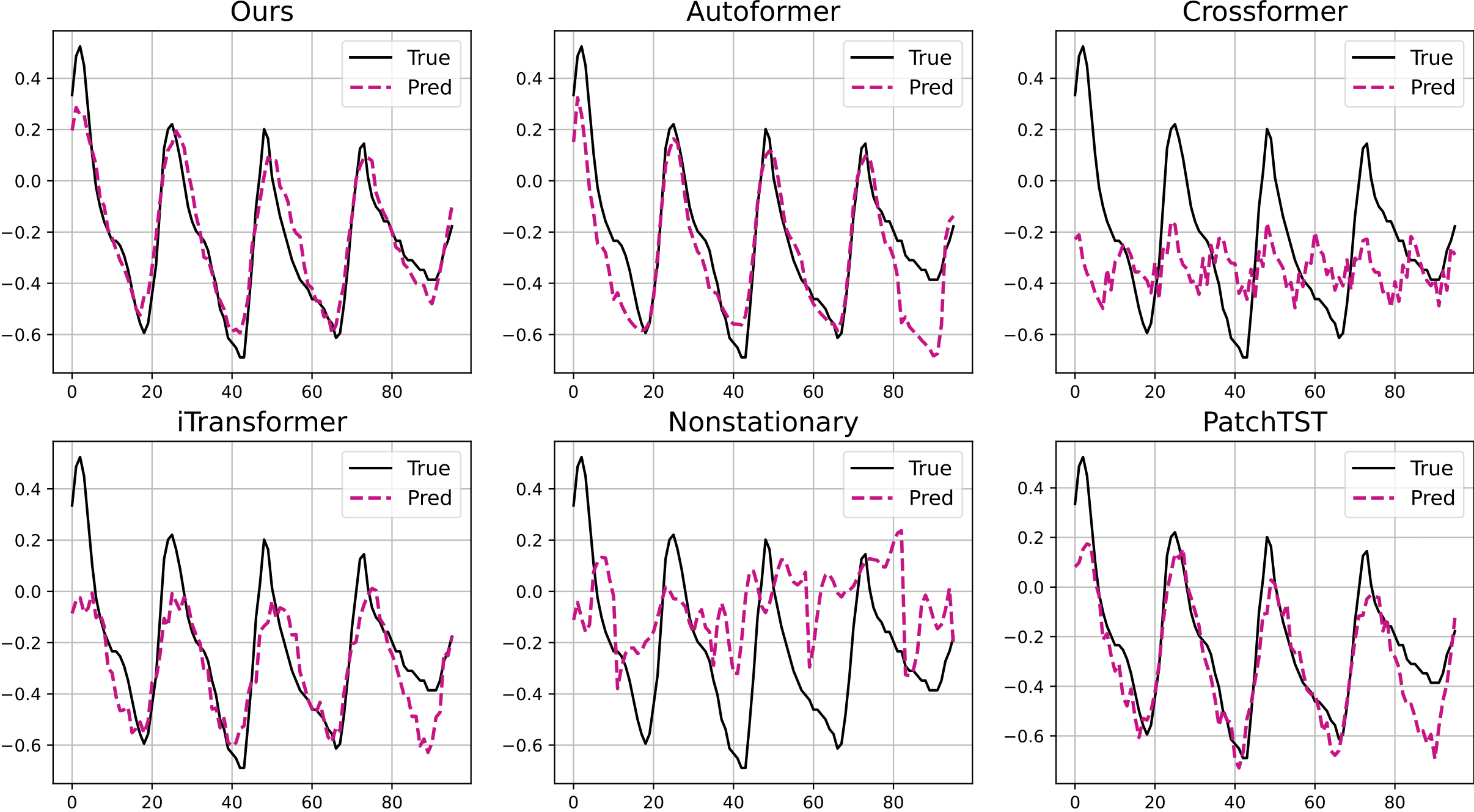
Sequence Complementor


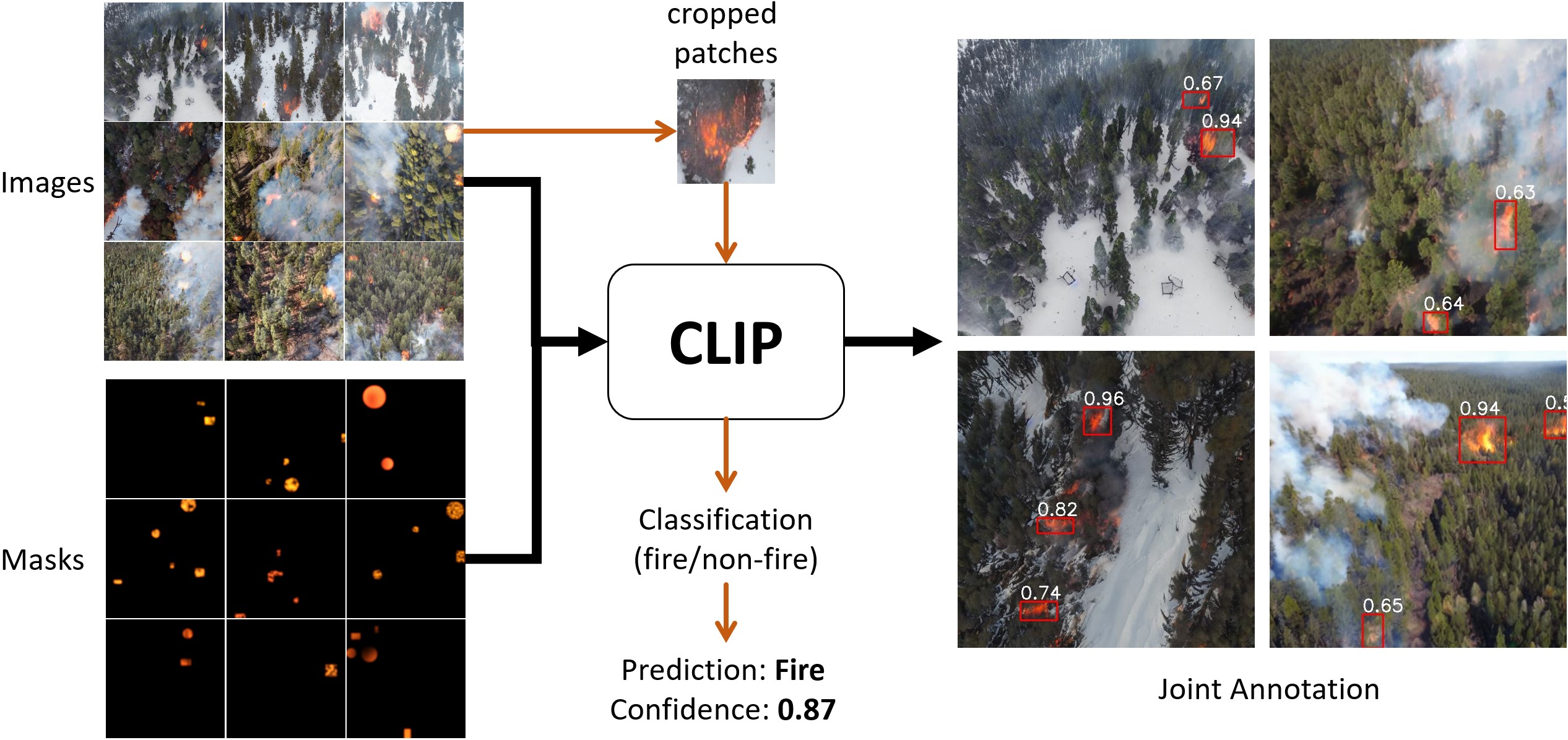

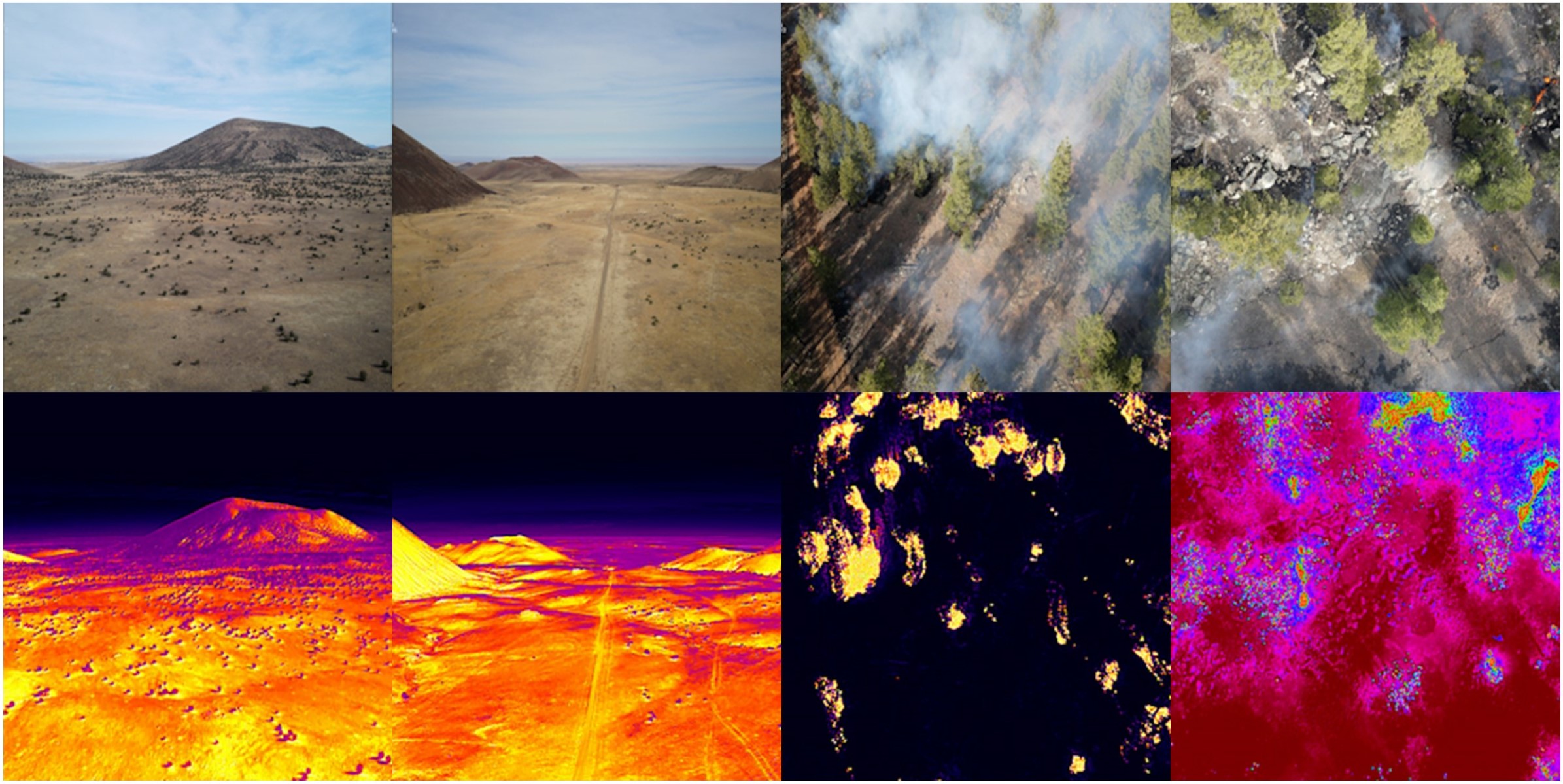
FLAME 2 Wildfire Dataset
This work presents a methodology for identifying and mapping fire and smoke using high-temporal and spatial-resolution observations from an integrated two sensor (mid-wave IR and visible bands) UAS-based imaging system. The paper also presents a unique dataset of side-by-side RGB/IR imagery collected during a prescribed fire near Flagstaff, Arizona in 2021 [20]. The images are jointly labeled by two human experts with fire/no-fire and smoke/no-smoke1 labels. In addition to aerial images, data on weather information, and georeferenced pre-burn point cloud data points are included in the dataset. It is expected that the methods developed to produce the FLAME2 dataset and others to follow can facilitate fire detection and modeling, as well as fire management.
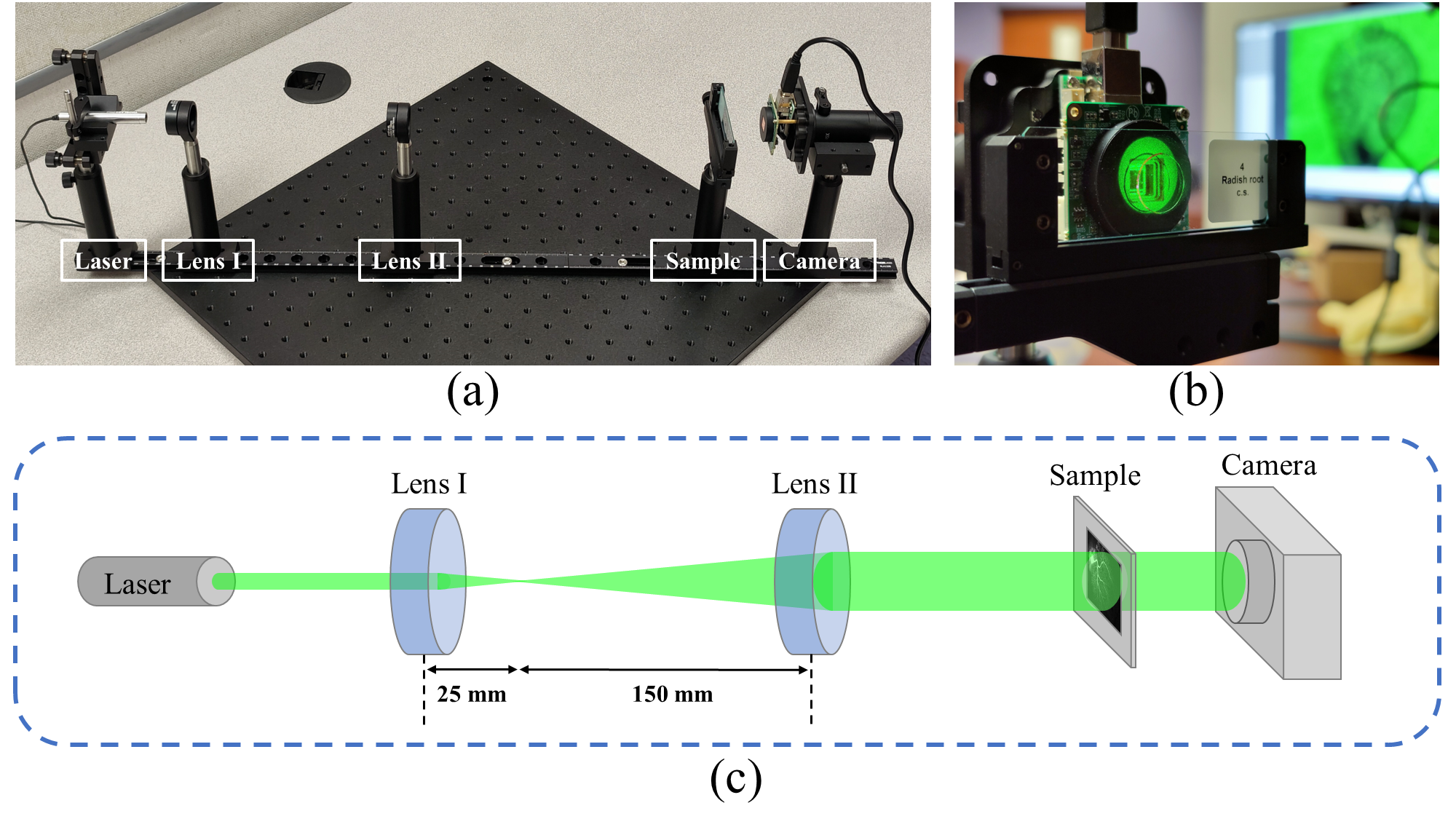
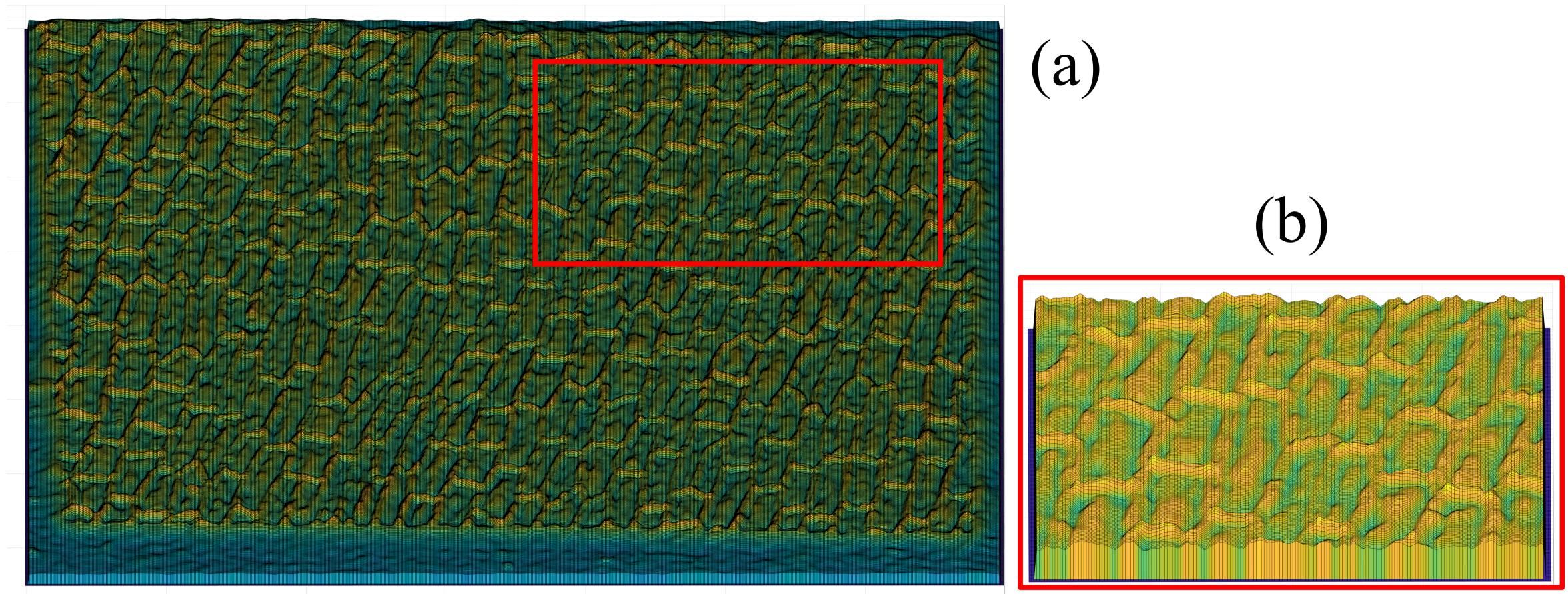
DH-GAN
We propose a new DL architecture based on generative adversarial networks that uses a discriminative network for realizing a semantic measure for reconstruction quality while using a generative network as a function approximator to model the inverse of hologram formation. We impose smoothness on the background part of the recovered image using a progressive masking module powered by simulated annealing to enhance the reconstruction quality. The proposed method is one of its kind that exhibits high transferability to similar samples, which facilitates its fast deployment in time-sensitive applications without the need for retraining the network
Deep Learning-TSA
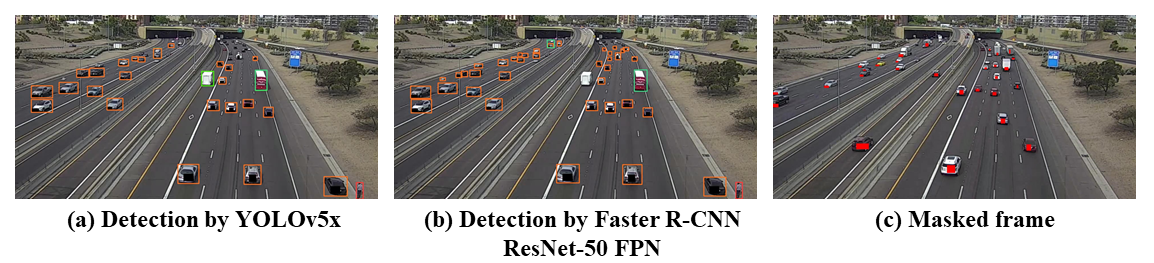
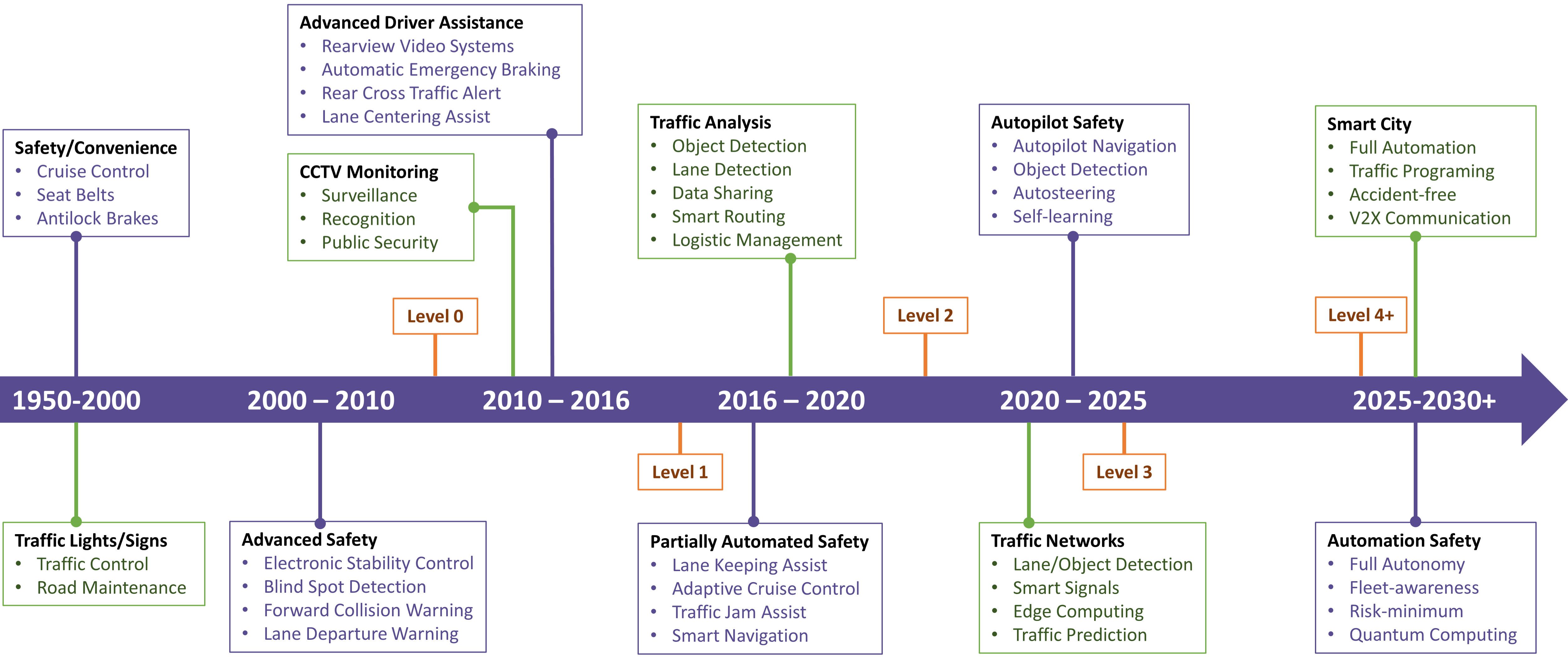
This paper explores deep learning (DL) methods that are used or have the potential to be used for traffic video analysis, emphasizing driving safety for both autonomous vehicles and human-operated vehicles. A typical processing pipeline is presented, which can be used to understand and interpret traffic videos by extracting operational safety metrics and providing general hints and guidelines to improve traffic safety.
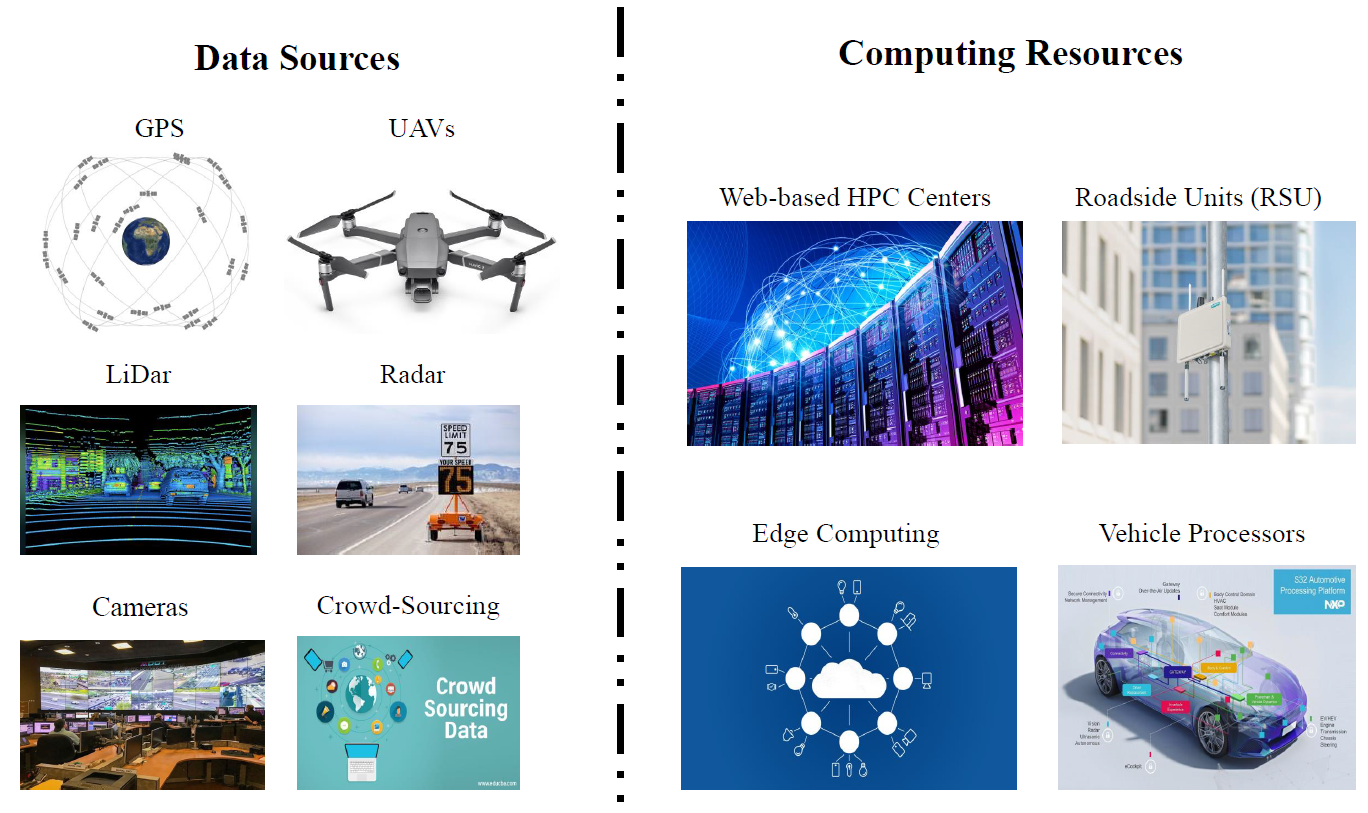
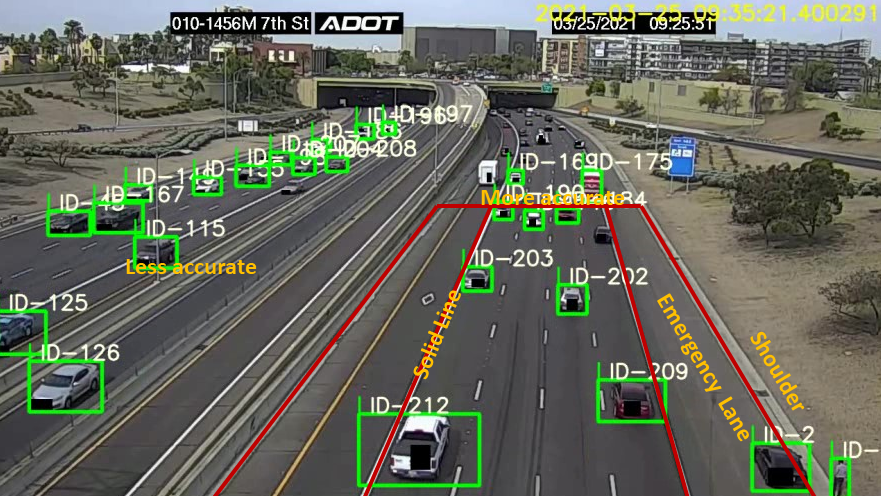
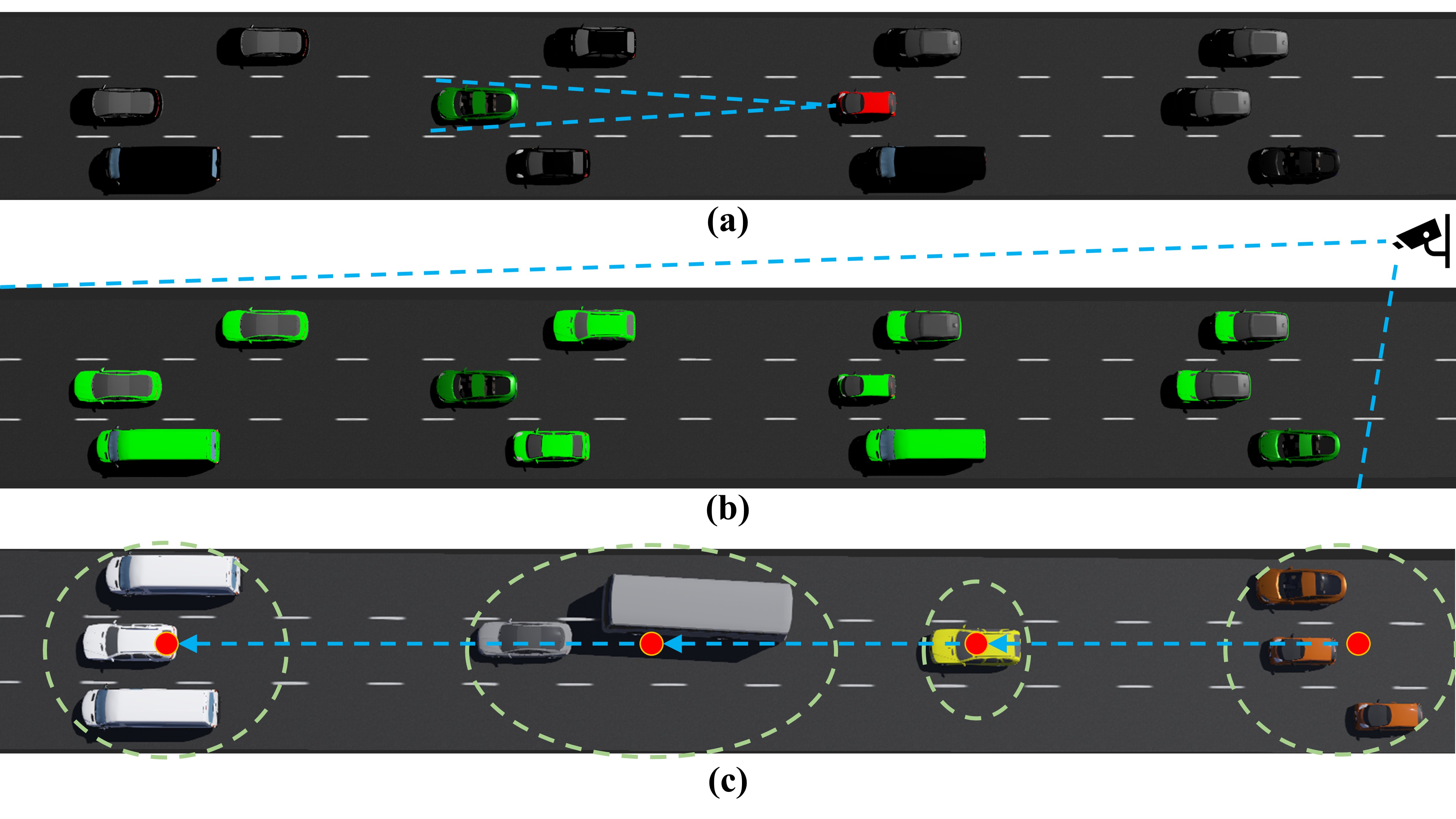
Driving Safety Analysis
We are working with Intel, Exponent, Arizona Department of Transportation, ASU, and UA to develop the Institute of Automotive Mobility (IAM) under a project funded by the Arizona Commerce Authority. This project concerns developing learning-based AI platforms to enhance the driving safety of self-driving and human-drive vehicles in the state of Arizona. The overarching goal of this initiative is developing traffic advisory systems, traffic system design guidelines, and online warning systems. My team is working on developing a learning-based anomaly detection method by processing network-level motion trajectories and profiling user's normal behaviors and driving style.

Remote Heart Monitoring
In this project, we are working on developing an individualized kit for remote monitoring of heart-related vital signals in order to trigger local and remote alarms when a life-threatening abnormality is predicted through analyzing the vital signals. The vital signals may include the heart ECG signal, environmental conditions (temperature and humidity), light, chemical pollutants, and activity level of a patient. RFID technology is used to identify patients. In training phase, the informative features of the vital signals will be extracted in order to capture the normal pattern of the signals at different states (sleep, wakefulness, physical exercise, ...). The kit will constantly monitor the signals and send it through a wireless channel to a central processing unit for further analysis. The system will ignite an alarm on the kit and will send an alarm message to the physician if abnormality is detected.
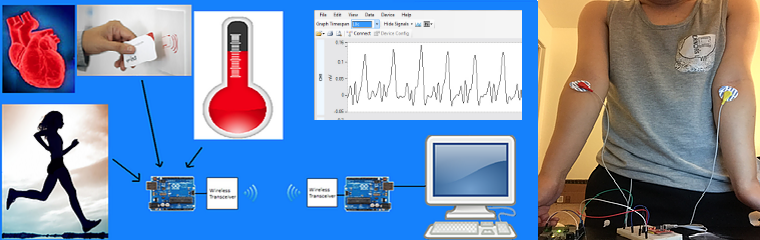
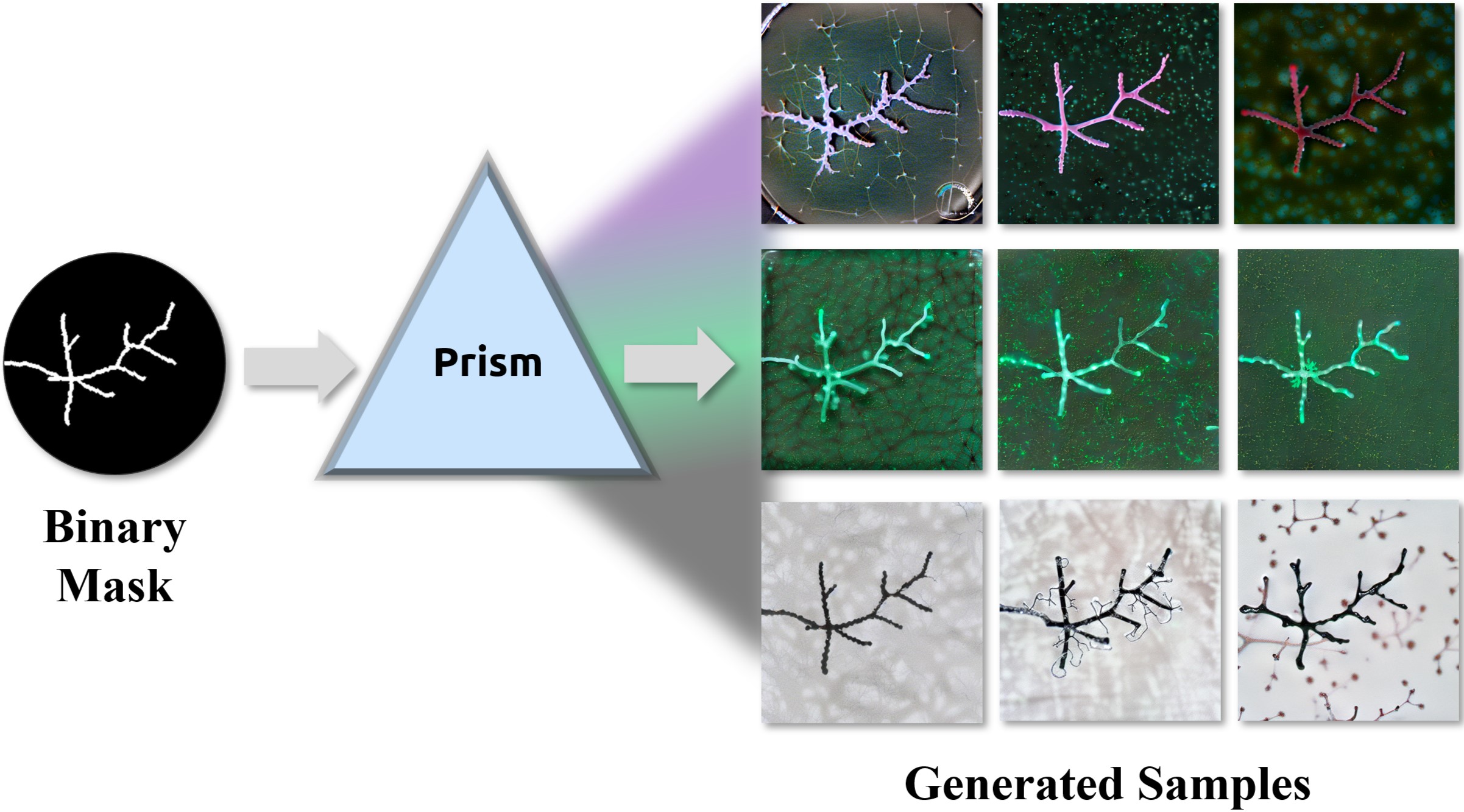
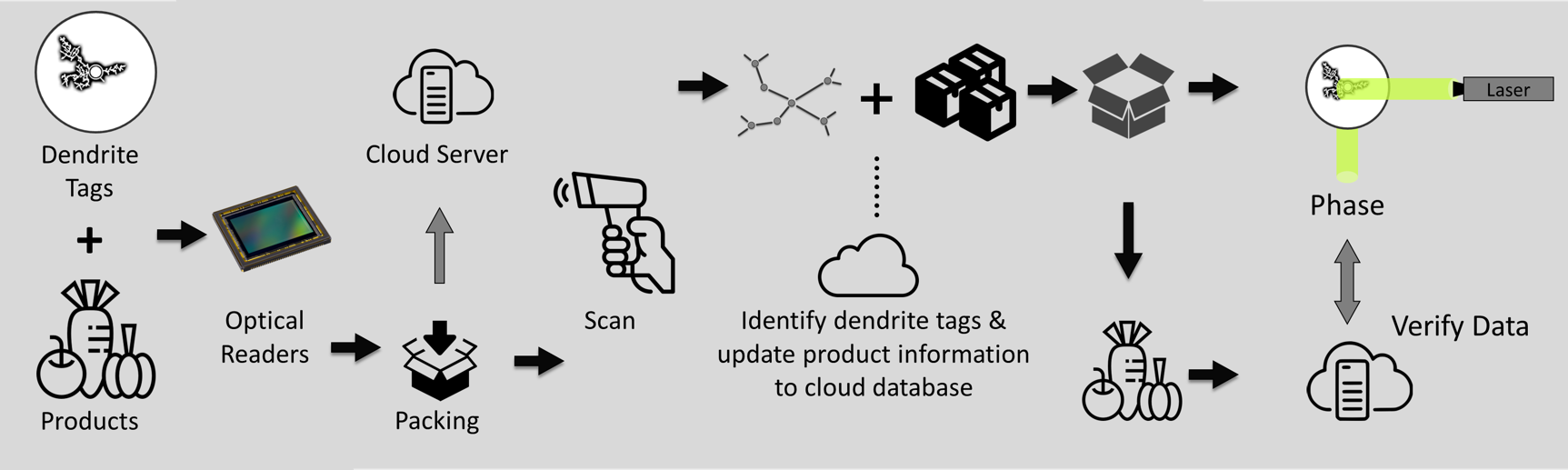
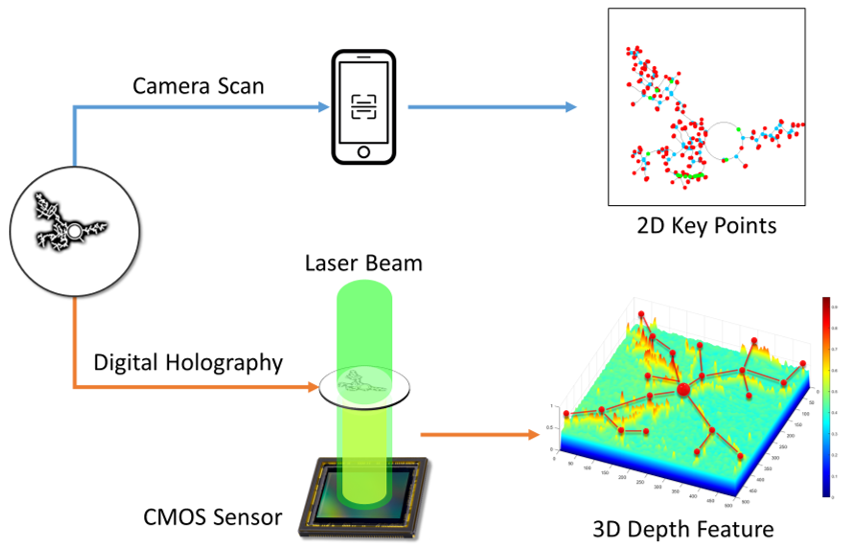
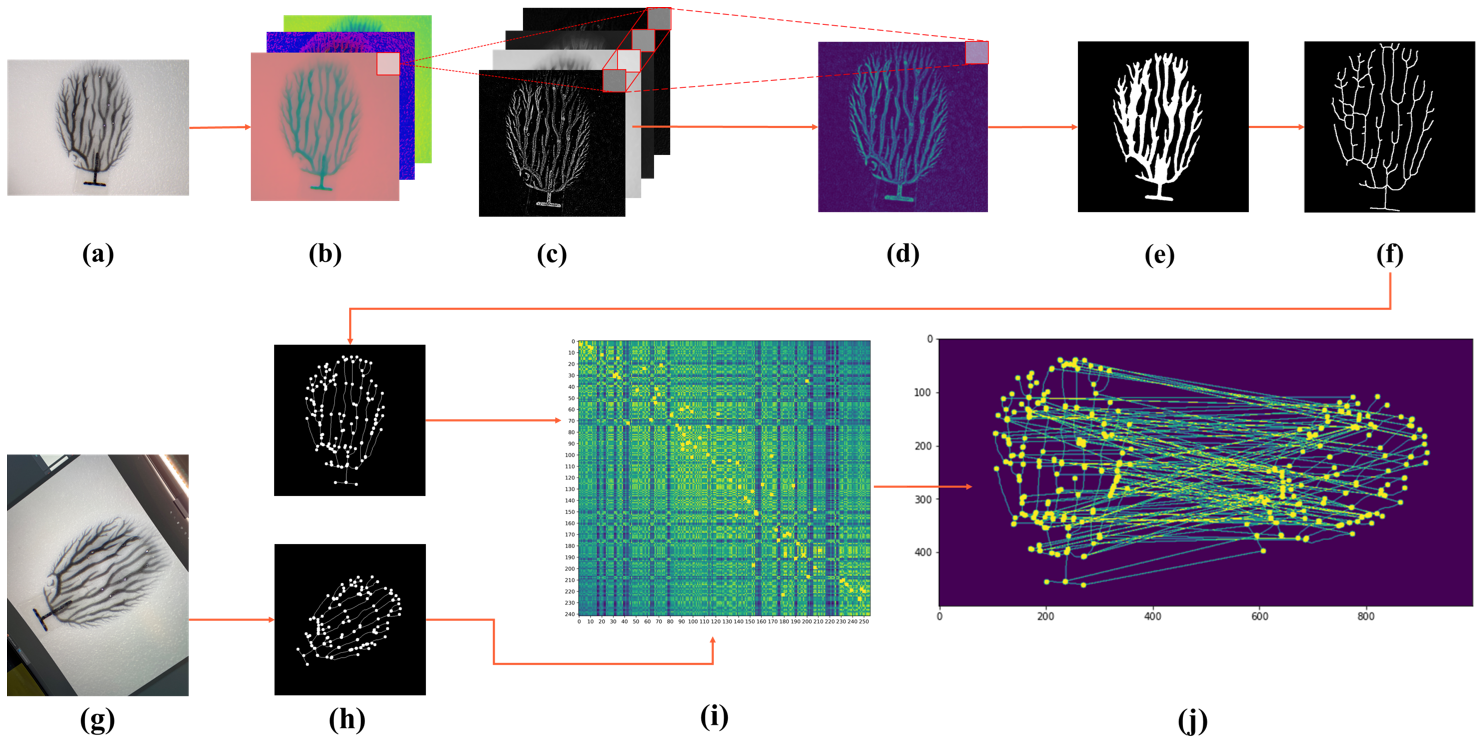
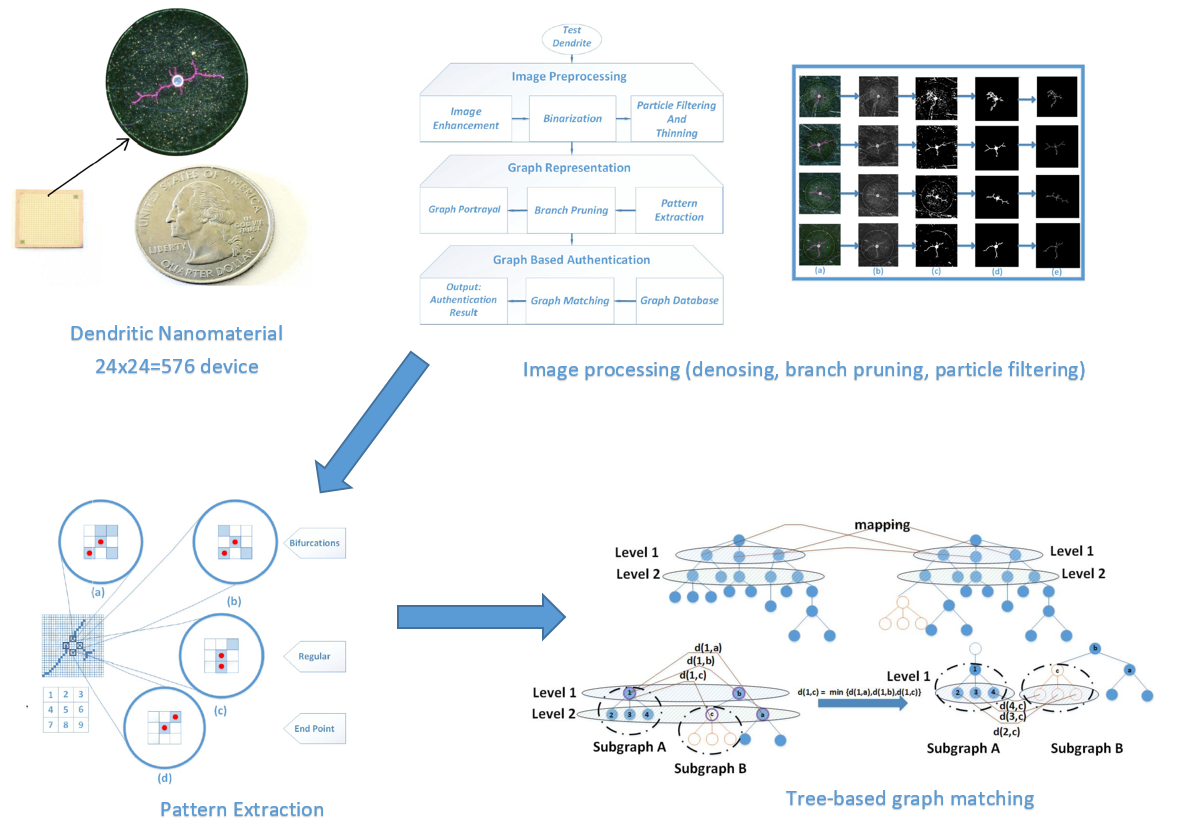
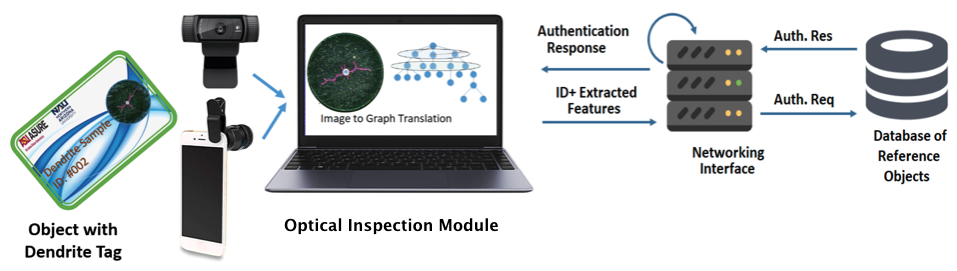
Image Based Nano-Resolution Optical Security for IoT
In this project, we develop novel graph-theoretic authentication algorithms for IoT security using dendrites, as unclonable nano-material identifiers with unique 3d tree-structured patterns. This project involves topics in machine learning, image processing and security algorithm design. The dendrite devices are built by our collaborators at ASU.
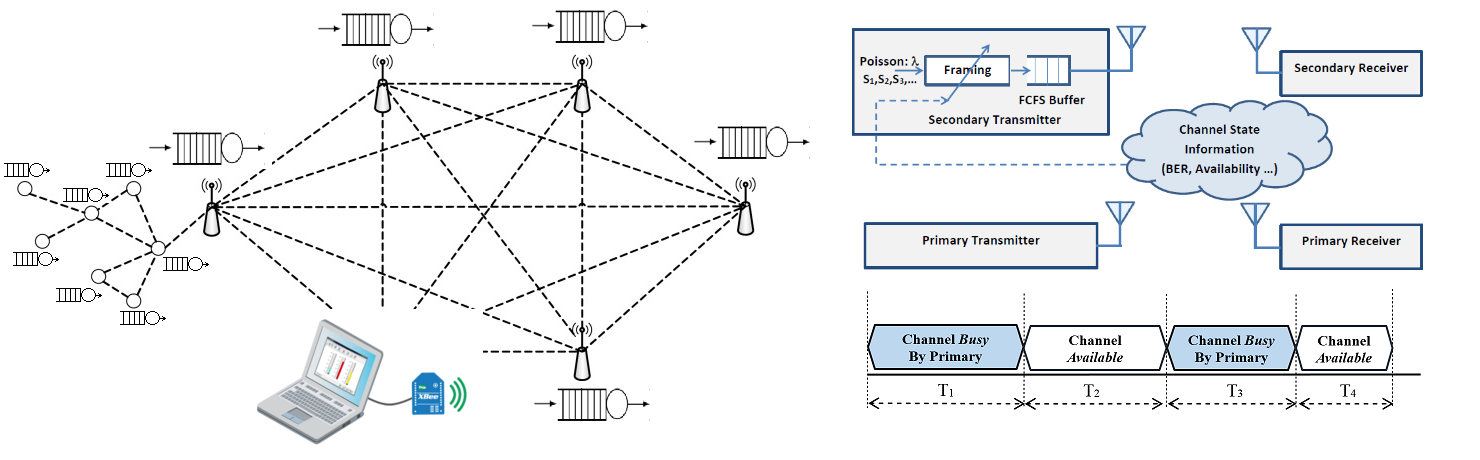
Optimal Packetization Policy for Secondary Users in Cognitive Radio Networks
In this project, we consider the entry point of Wireless Sensor Networks, where the sensor measurements are bundled into packets to be sent to a data fusion center. In current practical WSN platforms, the packet lengths are either constant or sole defined by input traffic statistics. In this project, we design an optimized packetization policies that constantly tracks the wireless channel conditions and adjusts the packetization criterion based on the current channel conditions.
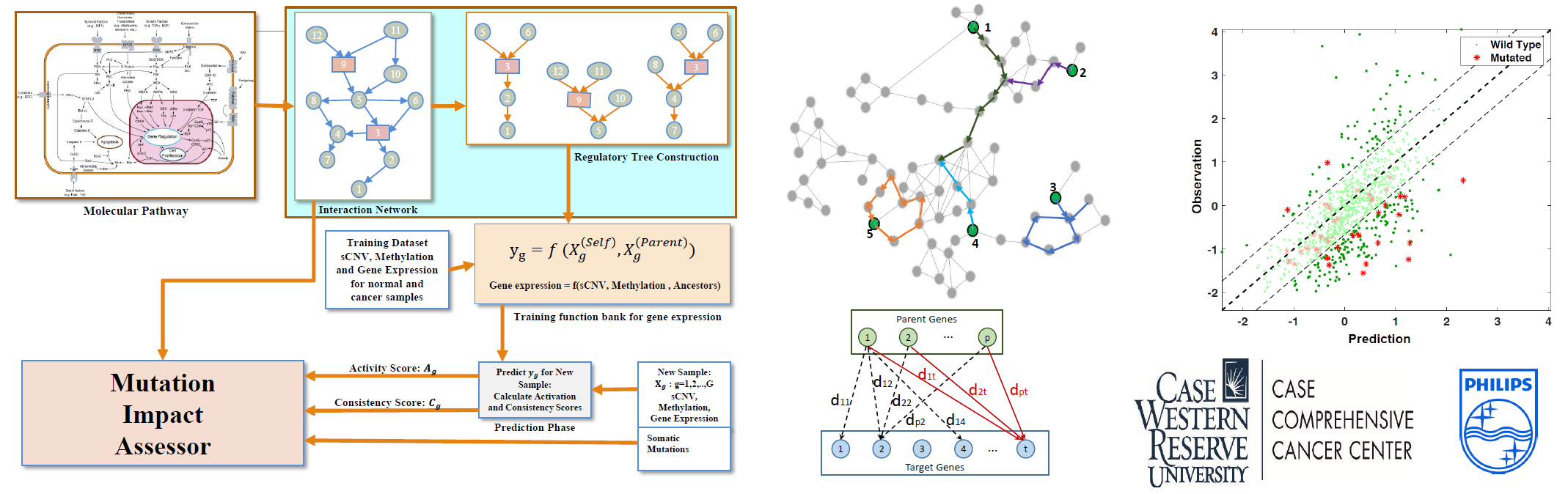
Computational Framework to Assess Functional Mutations Impacts
In this project, we develop a deep learning framework based on Bayesian hierarchical models in order to capture the regulatory relations among genes and protein complexes. This network model enables prediction of gene expression level for any cancer sample. We are looking to develop an impact analysis framework to identify somatic mutations in the parent genes that cause severe deviations in gene expression levels that leads to carcinogenesis. The results of this research will provided hypotheses for cancer-driver mutations for oncology community with application in targeted therapy design.
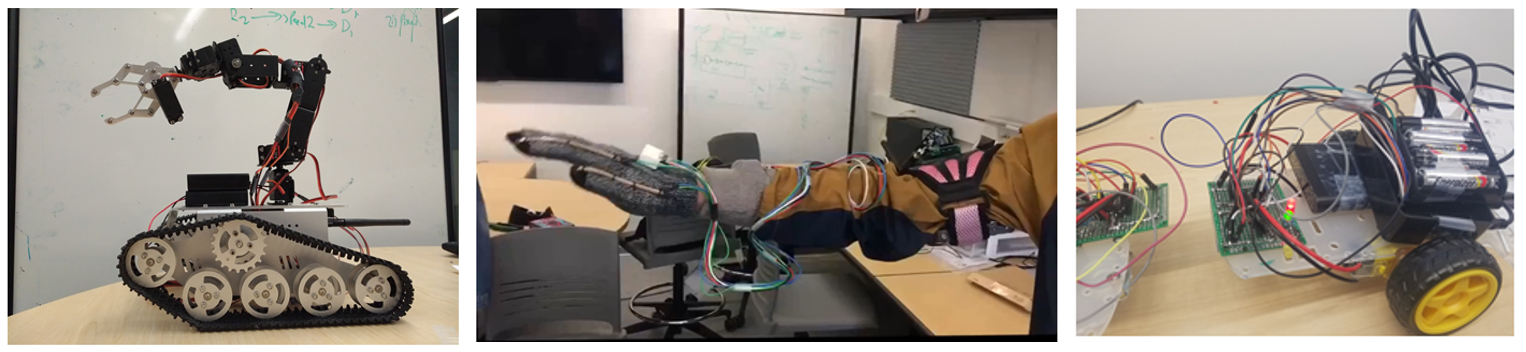
Robotics Design
We design robotics platforms to test advanced communication and control algorithms for real-world applications. It also helps our undergraduate students practice on-board programing and hardware design.